GNSS Tracker fürs Auto ohne Cloud
Projekt: GNSS Tracker ohne Cloud Kontakt: Boris Dirnfeldner
Hintergrund
Da ich aufgrund von Akku-Ausfallerscheinungen mein Handy austauschen musste, ist mir leider meine bisherige Fahrtenbuchsoftware weggefallen (nicht mehr kompatibel). Im Zuge dieser Recherchen bin ich tiefer in Welt der „GPS“(Korrekt: GNSS)-Tracker eingetaucht, da dies manche Anbieter im Paket mit einer Cloudsoftware als eine der Lösungen für automatische Erfassung von Fahrten anbieten. Das ist jetzt nicht wirklich für mich interessant, die Technik dahinter aber sehr wohl.
Eine der wichtigen Eigenschaften aller Lösungen ist die Notwendigkeit der Positionsbestimmung (z.B. per GPS), einer Datenübertragung und eines Servers zur Erfassung, Speicherung und Visualisierung.
Die Positionsbestimmung erfolgt (je nach Gerät) per Odometrie-Sensor, GNSS oder Bluetooth-Tracking. Wenn man örtlich unabhängig sein will, ist GNSS wohl der Standard. Hierbei gibt es inzwischen mehrere Systeme, GPS (USA), GLONASS (Russland), Galileo (Europa) und Beidou (China), die parallel zueinander verwendet werden können. Die Genauigkeit ist dabei abhängig von der Anzahl der empfangenen Satelliten und kann auf wenige Meter genau sein, allerdings auch unterirdisch schlecht. Mit deutlich mehr Aufwand und Kosten kann die Genauigkeit sogar in den Bereich von Zentimetern gedrückt werden (Stichworte DGPS und RTK). Die Odometrie, z.B. über Accelerator-Sensoren, ist da eine Ergänzung, für sich alleine aber zu ungenau über die Zeit. Die Bestimmung über BLE Token etc. eignet sich nur für Erkennung von einzelnen Orten, z.B. Zuhause.
Die GNSS Tracker gibt es in vielen Ausführungen und können je nach Anwendung mehr oder weniger viel. Neben der klassischen Handy-App gibt es mobile Geräte, z.B. zum Wandern. Eine oft verwendete Alternative sind Tracker für Haustiere (z.B. Katzen oder Hunde). Bei den KFZ ist der Bereich Flottenmanagement bei Firmen ein wichtiger Anwendungsfall. Der letzte Bereich ist für mich interessant, war aber bisher preislich völlig uninteressant.
Alle Tracker erfassen zuerst mal die Position des Geräts und je nach Anbindung und Fähigkeiten dann auch weitere Informationen. Diese Daten werden dann lokal im Gerät gespeichert und (sofern unterstützt) auch an einen Server übertragen. Der wird zumeist von einem Anbieter betrieben und erlaubt dann Zugriff auf mehr oder weniger Informationen.
Bei der Übertragung gibt es mindestens eine Verbindung über Kabel, Bluetooth oder Wifi (z.B. wenn nur eine Wanderung verfolgt wird) mit entsprechender Software auf Handy oder PC. Ansonsten werden die Daten über das Telefonnetz übertragen, entweder per Datenübertragung und/oder per SMS. Hier braucht es dann auch eine entsprechend aktivierte Karte und einen geeigneten Tarif (je nach Anwendung).
Lösungsansatz
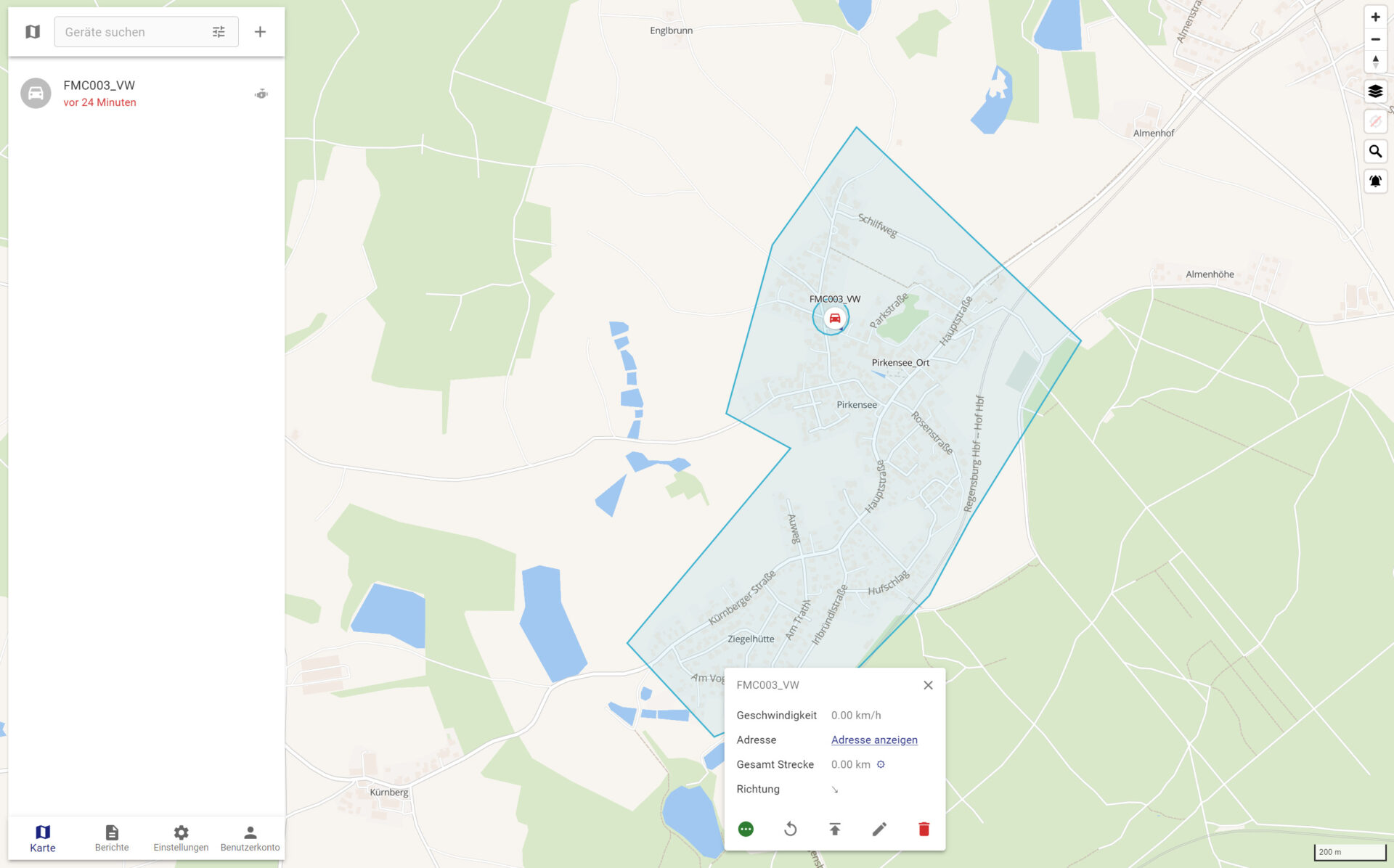
 Der Server in der Cloud war für mich immer ein will-ich-vermeiden-Punkt. Weniger wegen Überwachungsängsten, als das diese Dienste einfach zumeist Geld kosten und die erfassten Daten halt sehr leicht missbraucht werden können. Tatsächlich konnte ich aber im Rahmen der Recherche die Lösung Traccar finden. Die Software kann auf Docker im Eigenbetrieb genutzt werden, ist dabei frei nutzbar und bietet auch noch eine schöne GUI zur Ansicht.
Der Server in der Cloud war für mich immer ein will-ich-vermeiden-Punkt. Weniger wegen Überwachungsängsten, als das diese Dienste einfach zumeist Geld kosten und die erfassten Daten halt sehr leicht missbraucht werden können. Tatsächlich konnte ich aber im Rahmen der Recherche die Lösung Traccar finden. Die Software kann auf Docker im Eigenbetrieb genutzt werden, ist dabei frei nutzbar und bietet auch noch eine schöne GUI zur Ansicht.
Die Grundinstallation war ziemlich einfach und sofort einsatzklar. Leider zickt das Teil bei mir noch in Verbindung mit Traefik, der u.a. bei mir für die SSL-Zertifikate zuständig ist. Damit bleibt es vorerst nur bei HTTP.
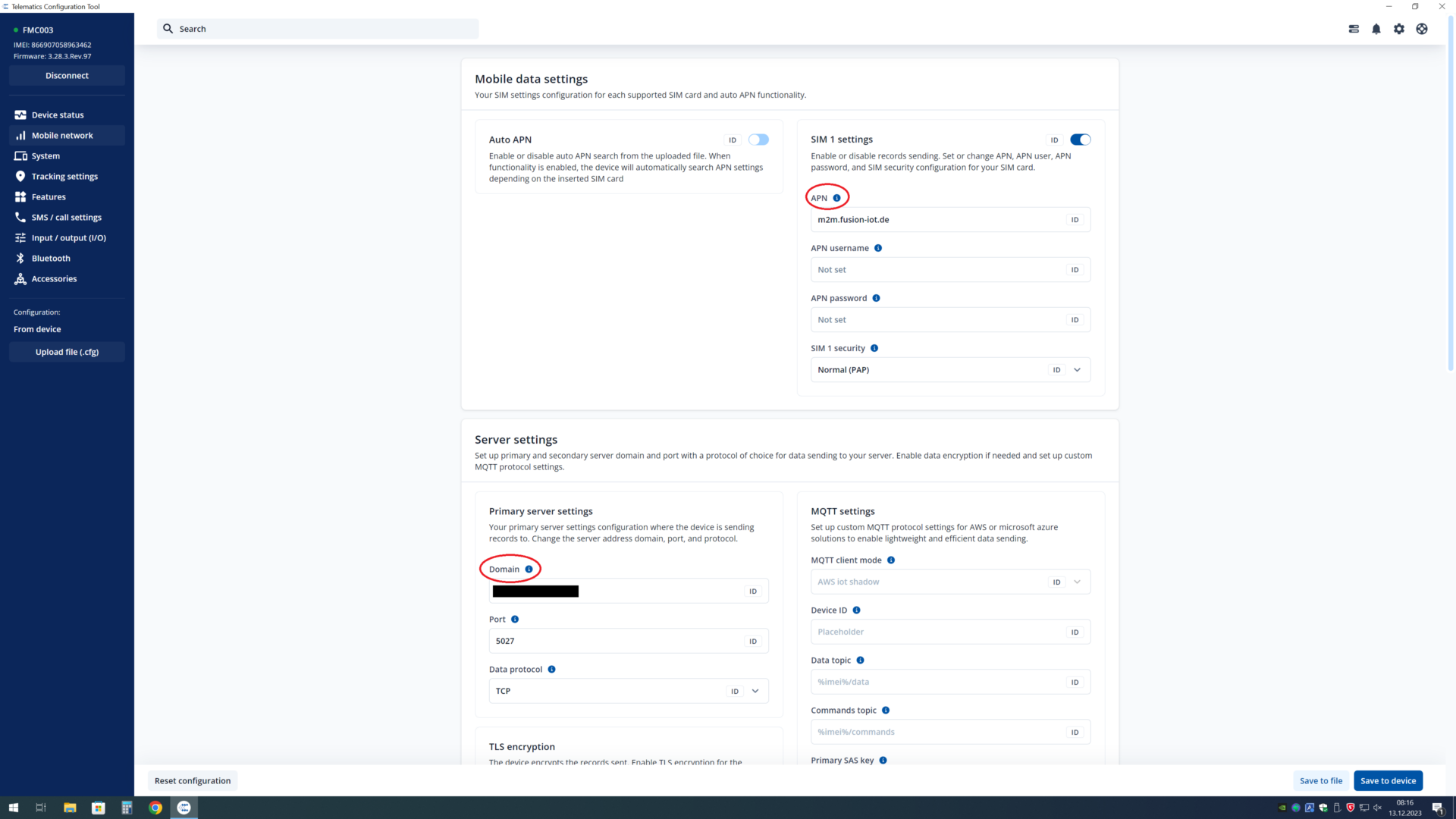
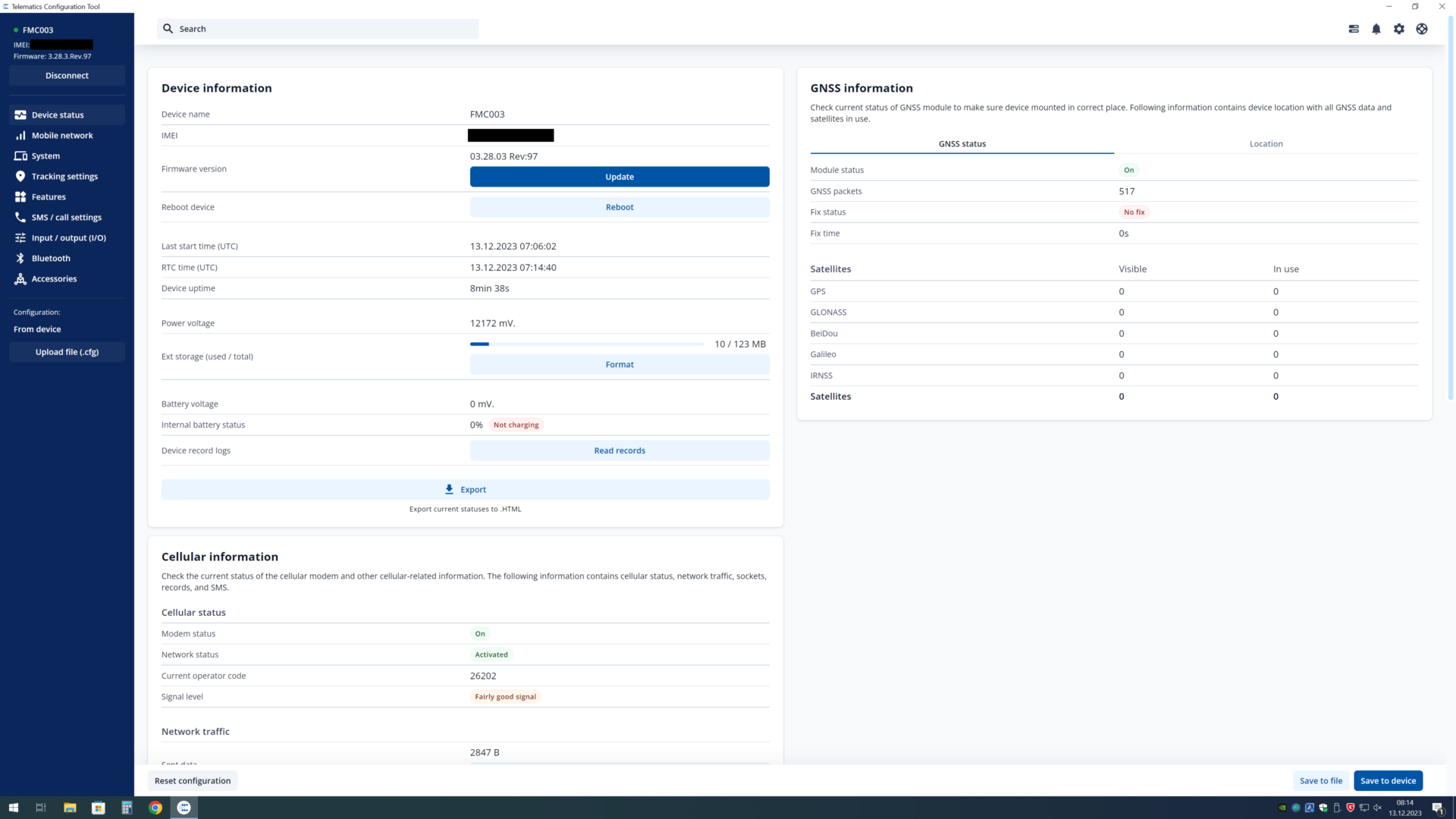
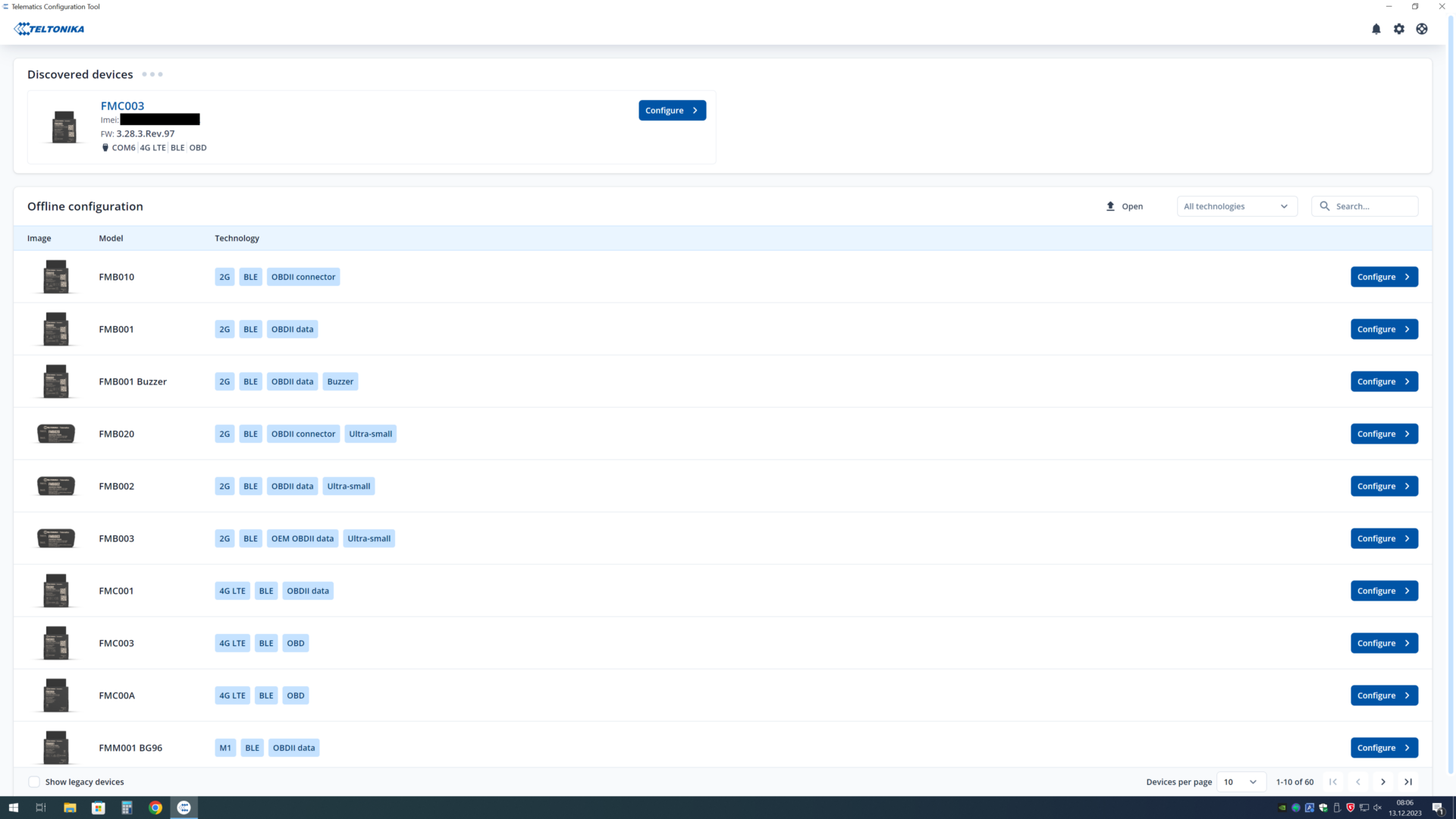
 Da ich mich für ein KFZ-Tracking interessiere, war für mich ein Gerät mit ODB-Schnittstelle interessant. Solche „Dongles“ werden auch bei den o.g. Fahrtenbuchanbietern verwendet. Ich konnte hier ein vergleichsweise günstiges Teltonika FMC003 (Vorführgerät) bekommen. Das Teil hat neben dem GNSS-Empfänger eine ODB-Schnittstelle, Bluetooth, einen Akku, eine USB Schnittstelle und eine ziemlich mächtige, als auch komfortable Software. Konfiguration erfolgte über das Telematics Configuration Tool. Die erlaubt mir alle wichtigen Parameter einzurichten und noch einige Komfortfunktionen. Bei der Datenschnittstelle wird LTE unterstützt, was im Vergleich zu den deutlich günstigeren 2G-Trackern hoffentlich langfristiger genutzt werden kann. 2G steht ja in der Diskussion, ob es abgeschaltet wird (und wurde auch schon in einigen Ländern abgeschaltet).
Da ich mich für ein KFZ-Tracking interessiere, war für mich ein Gerät mit ODB-Schnittstelle interessant. Solche „Dongles“ werden auch bei den o.g. Fahrtenbuchanbietern verwendet. Ich konnte hier ein vergleichsweise günstiges Teltonika FMC003 (Vorführgerät) bekommen. Das Teil hat neben dem GNSS-Empfänger eine ODB-Schnittstelle, Bluetooth, einen Akku, eine USB Schnittstelle und eine ziemlich mächtige, als auch komfortable Software. Konfiguration erfolgte über das Telematics Configuration Tool. Die erlaubt mir alle wichtigen Parameter einzurichten und noch einige Komfortfunktionen. Bei der Datenschnittstelle wird LTE unterstützt, was im Vergleich zu den deutlich günstigeren 2G-Trackern hoffentlich langfristiger genutzt werden kann. 2G steht ja in der Diskussion, ob es abgeschaltet wird (und wurde auch schon in einigen Ländern abgeschaltet).
Die Telefonkarte war hier für mich ein Problem. Ich wollte hier einfach mal einen Versuch starten und nicht gleich einen neuen Vertrag aufmachen. Grundsätzlich braucht es mindestens die Datenübertragung, optional auch SMS. Man kann hierzu eigentlich jede Karte verwenden (sofern die PIN deaktiviert wurde, allerdings finde ich hier die Angebote für IOT interessant. Die Karten und deren Tarife sind weniger auf massig Freikontingente ausgelegt, sondern auf ein möglichst flexibles Roaming und damit maximale Erreichbarkeit. Leider sind die meisten Angebote für mich wenig attraktiv gewesen, weil die an sich günstigen Tarife wegen hoher Versandkosten für die Karten (nur zum Testen) übermäßig teuer wurden.
Eher per Zufall habe ich ein Testangebot von Epsilon Telekom gefunden. Die bieten für die Marke Fusion IoT eine Testkarte mit Tarif für 12 Monate an, pro Monat 500Mb Freikontingent. Danach wird die Karte automatisch abgeschaltet. Für mich perfekt. Und in 12 Monaten kann ich dann genauer sagen, was ich brauche. Je nach Angebot kann ich ja dann einfach bleiben und gut ist es.
Wie die meisten anderen Anbieter für IoT-Karten gibt es ein entsprechendes Portal zur Verwaltung der Karten. Für mich derzeit etwas Zuviel, aber super wenn mal mehrere Karten unterwegs sind.
 Die Installation des Tracker an sich war ziemlich einfach. Beim Gerät war ein OSB-Adapter dabei, der in Verbindung mit einem Labornetzteil die Einrichtung am Tisch erlaubt hat. Im Auto (Ford Focus Kombi) ist leider der Montageplatz des OSB-Steckers ziemlich blöde und erlaubt nur eine Anordnung, bei der dann die Füße beim Aus- und Einsteigen den Stecker versuchen abzureißen (links vom Fahrer, in der Höhe von Unterschenkel unter dem Lenkrad). Der Versuch mit einem Adapterkabel war leider auch nicht erfolgreich, weil das Kabel immer noch verhindert hat, dass die Abdeckklappe geschlossen werden konnte. Der Stecker konnte aber leicht aus der Halterung rausgenommen werden und dann mit dem Tacker zusammen sauber im Freiraum verstaut werden. Nur bei KFZ- und TÜV-Terminen muss ich hier aufpassen.
Die Installation des Tracker an sich war ziemlich einfach. Beim Gerät war ein OSB-Adapter dabei, der in Verbindung mit einem Labornetzteil die Einrichtung am Tisch erlaubt hat. Im Auto (Ford Focus Kombi) ist leider der Montageplatz des OSB-Steckers ziemlich blöde und erlaubt nur eine Anordnung, bei der dann die Füße beim Aus- und Einsteigen den Stecker versuchen abzureißen (links vom Fahrer, in der Höhe von Unterschenkel unter dem Lenkrad). Der Versuch mit einem Adapterkabel war leider auch nicht erfolgreich, weil das Kabel immer noch verhindert hat, dass die Abdeckklappe geschlossen werden konnte. Der Stecker konnte aber leicht aus der Halterung rausgenommen werden und dann mit dem Tacker zusammen sauber im Freiraum verstaut werden. Nur bei KFZ- und TÜV-Terminen muss ich hier aufpassen.
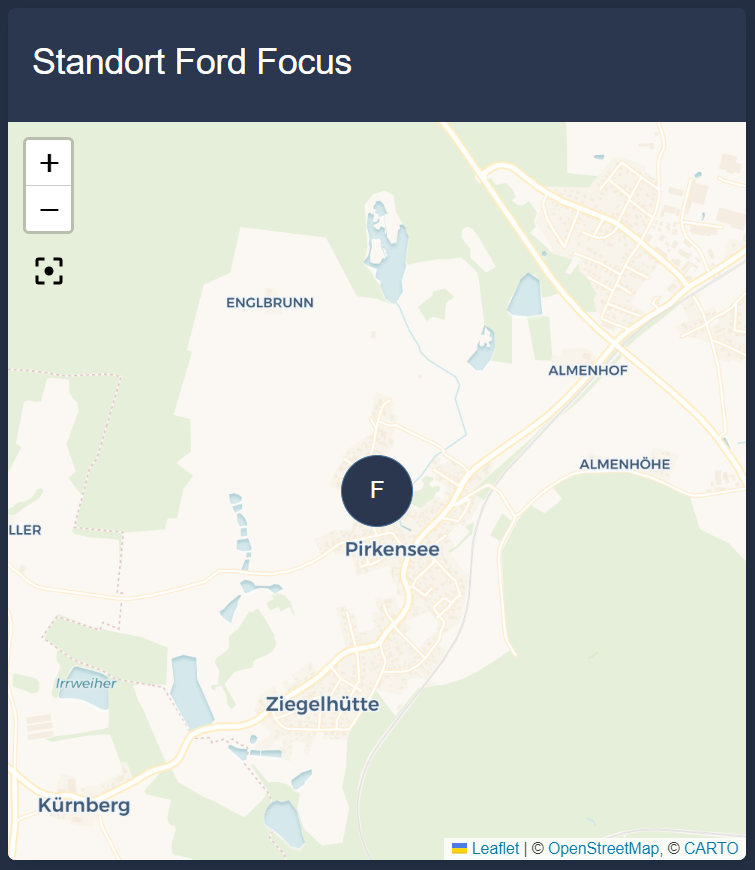
Damit läuft nun das ganze System sauber. Wenn der Wagen steht, liefert die Umgebung eine Aktualisierung jede Stunden. Bei Fahrten zeitnah. Alles ist einstellbar und die Weboberfläche ist auch ziemlich komfortabel. Eine Lösung für ein automatisches Fahrtenbuch habe ich so nicht, war aber nie das Ziel.
Dafür kann Traccar auch an den Home Assistant angebunden werden (Integration Traccar) und dort die Fahrzugposition weiter geben. Nice.
Datenvolumen
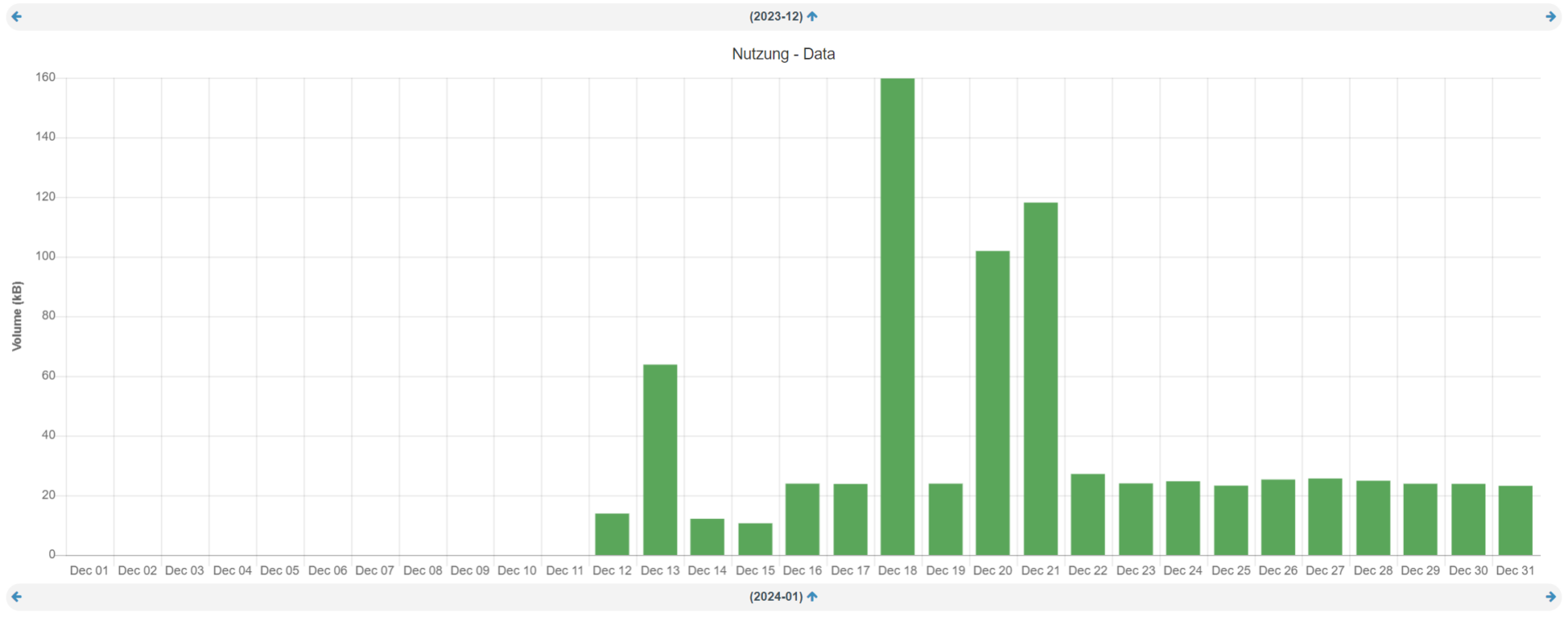
Nach ein paar Wochen Betrieb kann ich nun auch was zum benötigten Datenvolumen sagen. Wenn der Wagen ausschließlich steht, verbraucht der Dongle ca. 24 Kb am Tag. Wenn damit gefahren wird, einige Kb mehr. Bei meinem üblichen Fahrvolumen war eine Spitze von 180Kb gemessen worden.
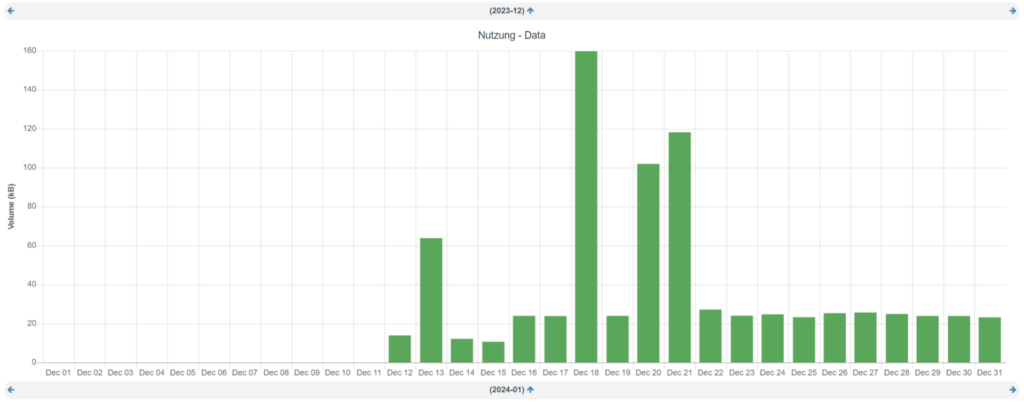
Damit kann ich schon mal sicher sagen, dass die meisten Karten für IOT-Anwendungen mit wenigen Mb völlig ausreichend sein dürften. Wenn ein paar SMS für Alarmmeldungen auch dabei sind, wäre es perfekt. Naja, mal sehen was nach dem freien Jahr dann weiter verwendet wird. Ich erinnere mich an Angebote mit IOT-Karten mit einem Inklusiv-Datenvolumen vom 100Mb Gesamt (nicht monatlich) und mehreren Jahren Laufzeit. Der Preis war ca. 20€ plus Handlingskosten. Damit würde ich dann eine lange Zeit auskommen.