Als langjähriger RC-Modellhubschrauber Fan konnte ich mich dem Charm der diversen Varianten von Drohnen kaum lange verschließen. Nach etwas rumspielen mit einer Minidrohne ist nun eine richtige Kameradrohne in Arbeit. Der Artikel wird immer wieder mit Nachfolgeartikeln ergänzt sobald sich ein neuer Stand ergibt.
Projekt: Quadrocopter
Kontakt: Boris Dirnfeldner
Link: – eigenes Projekt –
Gestartet habe ich mit einer Minimalkonfiguration, also den Bestandteilen die unbedingt zum Fliegen erforderlich sind. Dazu gehört der Rahmen, Motore, ESCs, Flugrechner, Empfänger und kleiner Akku mit Stromverteilung. Alles andere wird erst später dran gebaut.
Der erste Stand ist erstmal provisorisch zusammengebastelt. Die Teile sind auch nur provisorisch befestigt um die Flugeigenschaften zu testen. Nachdem also alles irgendwie zusammen hält, raus auf die Wiese zum testen.
Das Teil liegt sehr stabil in der Luft (erstmal ohne GPS) und reagiert noch angenehm agil auf Steuerungsbefehle (ist auch noch sehr leicht). Erst mal wird nur im „Stabilize“-Mode geflogen (Roll und Pitch-Achsen werden automatisch ausgerichtet wenn keine Knüppelvorgabe erfolgt), damit auch keine Höhen- und Positionskontrolle. Die Fernsteuerung ist auch noch nicht für Mode-Änderungen etc. eingerichtet.
Von der Lautstärke ist die Drohne angenehm leise (Zitat Nachbar: „Wie mein Rasenmähroboter, nur etwas höher in der Tonlage“). Im Radius von 5 Metern deutlich zu hören, danach aber sehr dezent auch wegen der tiefen „Tonlage“.
Bei heftigeren Ruderbewegungen und starken Bremsen „schrappen“ die Propeller etwas, da kommt das Nylon-Karbon-Gemisch wohl an seine Grenzen.
Es war aber schon einiges an Vorarbeit und Erfahrung zu machen, bis das Teil endlich geflogen ist (und auch in der Luft blieb).
Zum einen mussten erst mal die ESCs kalibriert werden. Ansonsten ist das Regelverhalten des Flugrechners schwierig (weil die Motoren unterschiedlich früh starten und die maximale Leistung erreichen; der Flugrechner muss dann manuell nachregeln). Die Signalisierung per Audio ist am Anfang gewöhnungsbedürftig, dann aber sehr intuitiv.
Die Kalibrierung des Kompass- und Lagesensors ist auch anzuraten (einmal reicht dann aber normalerweise).
Sehr zu empfehlen ist aber die korrekten Einstellungen der Achsenrichtungen. Beim ersten vorsichtigen Versuch im Büro hat meine Drohne gleich mal einen Salto vorwärts gemacht weil ich hier eine Achse in die falsche Richtung eingerichtet habe.
Es lohnt sich auch die Propellerbefestigung sehr gründlich zu prüfen. Auch hier konnte ich einen freifliegenden Propeller im Büro genießen weil einer nicht fest genug angezogen war. Selbstsichernde Versionen gibt es leider für die A2212 Motoren nicht.
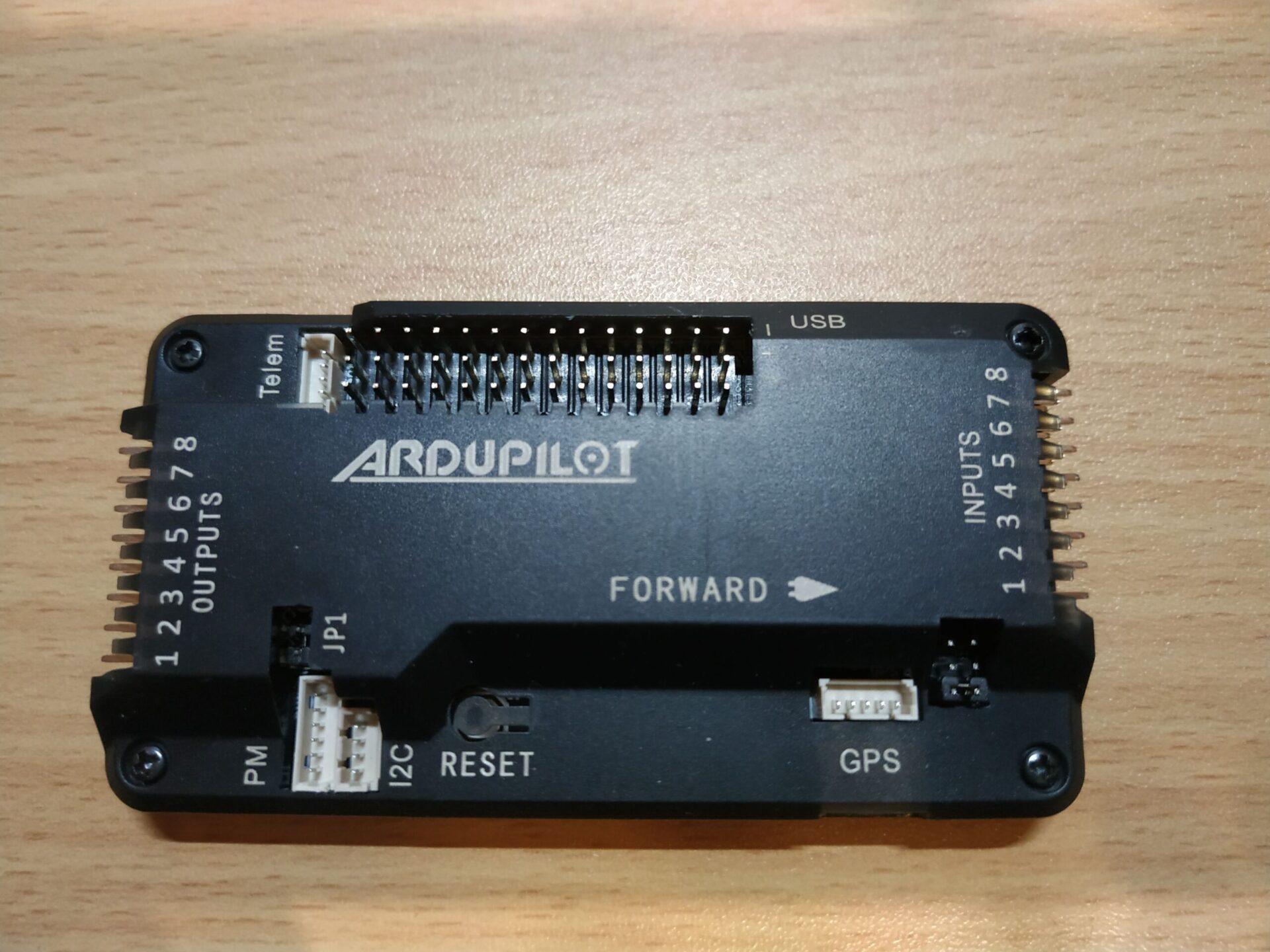
Der Flugrechner ist leider nicht mehr in der Liste der unterstützten Systeme von ArduPilot, tut aber in der letzten unterstützten Version (3.2.1) seinen Dienst ohne Probleme. Wenn ich irgendwann mal eine neuere Version haben will, muss das Teil ersetzt werden. Vorerst war es ein billiger Einstieg und ist definitiv gut genug.
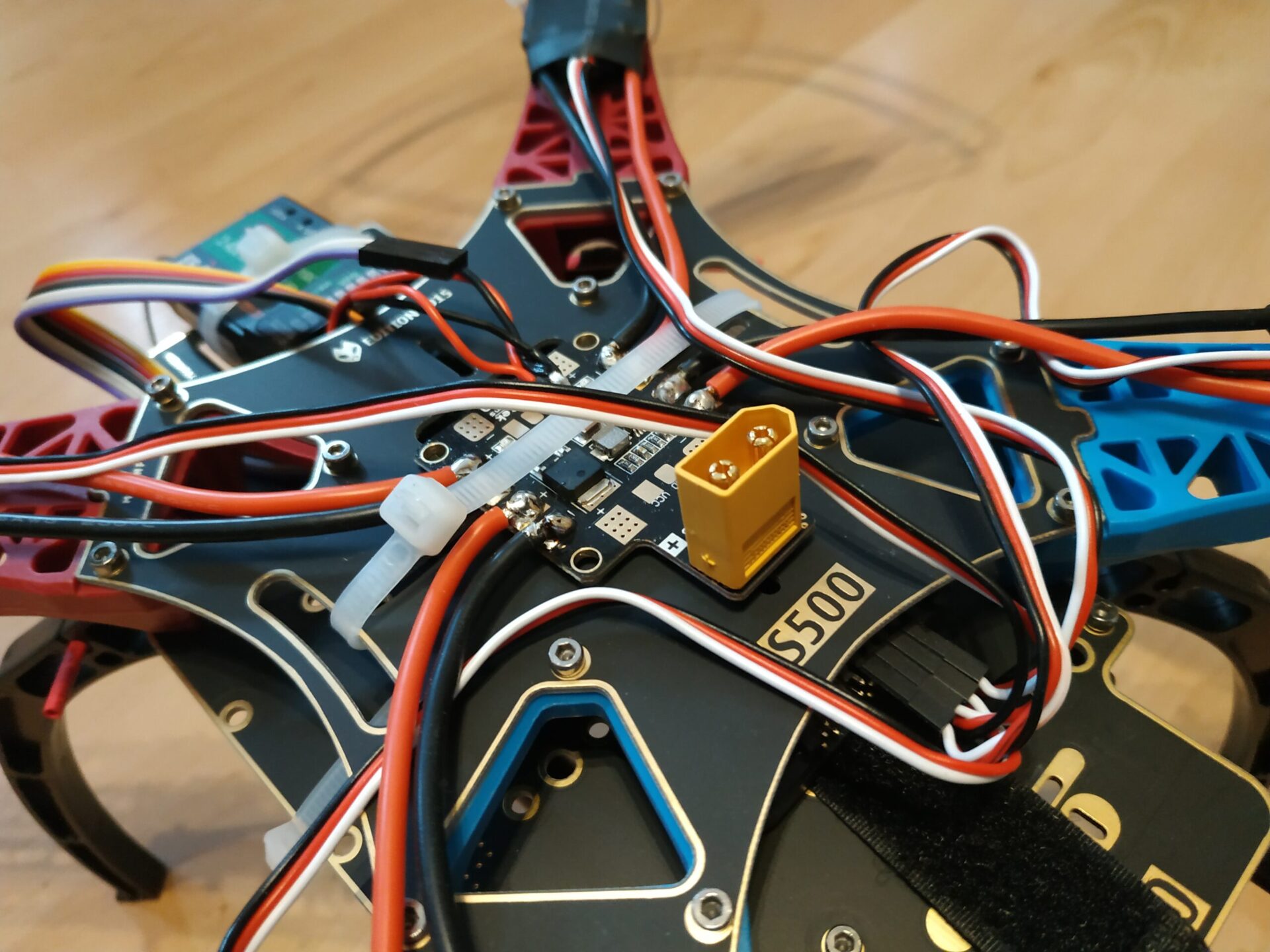
Das Stromverteilermodul hat ein BEC für 5V und 12V. An sich gut, leider haben auch die ESC BECs für 5V und über Flugrechner und RC-Empfänger wird alles miteinander verbunden. Ich habe über diverse Foren gelernt, das dies die Regler der einzelnen BECs ziemlich fordert und Probleme verursachen kann. Vorerst sind die ESCs mal abgeklemmt.
Das Überwachungsmodul für den Akku ist toll. Am Display kann man die Gesamtspannung und die Spannungen der einzelnen Zellen sauber ablesen.
Wenn die Spannung unter einen einstellbaren Schwellwert sinkt, gibt das Teil über 2 Piezo-Beeper lautstark Alarm.
Es lohnt sich auch die Anschaffung des Beepers und der beiden Statusleds (für Arm-Status bzw. GPS-Fix). Das würde den Start vereinfachen, gerade wenn es Probleme gegeben hat. Ist bestellt für die nächste Version…
Komponenten:
Frame: S500
ESC: ReadytoSky 30A SimonK (4x)
Motors: A2212 KV1000 (4x)
RC Sender: FlySky FS-TM10
RC Empfänger: FlySky FS-IA10B
Flugrechner: APM2.8
Firmware: Ardupilot 3.2.1
Überlegungen:
Quadrocopter: Standardkonfig, entsprechende Frames sind billig zu bekommen und sehr ausgereift. Später evtl. Hexacopter wenn mehr Last angehoben werden muss. Octacopter wäre schön, ist aber zu teuer.
APM 2.8: Nicht mehr für neue Versionen von Ardupilot unterstützt, aber sehr günstig zu bekommen und mehr als ausreichend für die meisten Ansprüche.
A2212 Motore und 1047 Propeller: Beim S500 Eigenbau eine häufig genutzte Konfiguration und recht günstig zu bekommen.
Schäden:
– Ein Propeller beim Salto.
– Einige Nerven bis ich das Prozedere zur Einrichtung endlich richtig durchdrungen hatte.