Houston – wir haben ein Bild
Das ewige An-die-Anlage-Latschen-um-Leistungsdaten-zu-bekommen ist mir nun endgültig zu blöd, zumal es bei mehr als 35° noch weniger Laune macht als sonst. Es ist also mehr als dringend geboten endlich die Daten vernünftig zu erfassen. Auch um zu verhindern, das ich mir doch noch das überteuerte Gateway vom Wechselrichterhersteller kaufe und alles in die Cloud schicke.
Projekt: Solaranlage
Kontakt: Boris Dirnfeldner
Link: – eigenes Projekt –
Situation:
Das hinterste Modul auf der Südseite ist auf die Ostseite umgezogen und unterstützt das schon vorhandene Testmodul in seiner Tätigkeit bis ca. Mittag. Zwar ist die Kabelage immer noch vorläufig, aber grundsätzlich vollständig.
Die beiden Südseite-Module sind noch nicht aufgeständert, auch weil es für derartige Arbeiten derzeit einfach zu heiß ist. Jeweils ein Modul auf der Ost- und Südseite sind parallel an einem String angeschlossen.
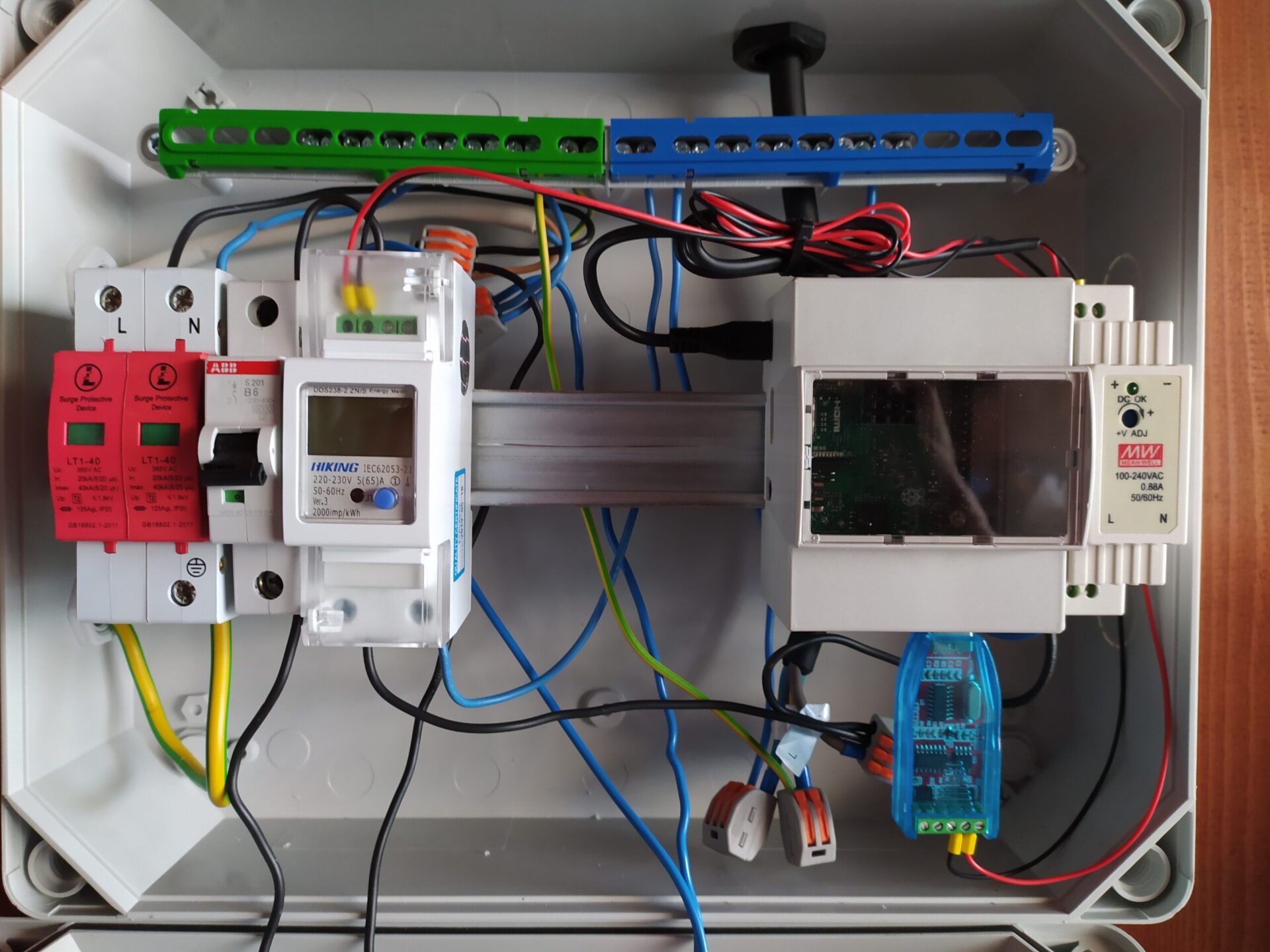
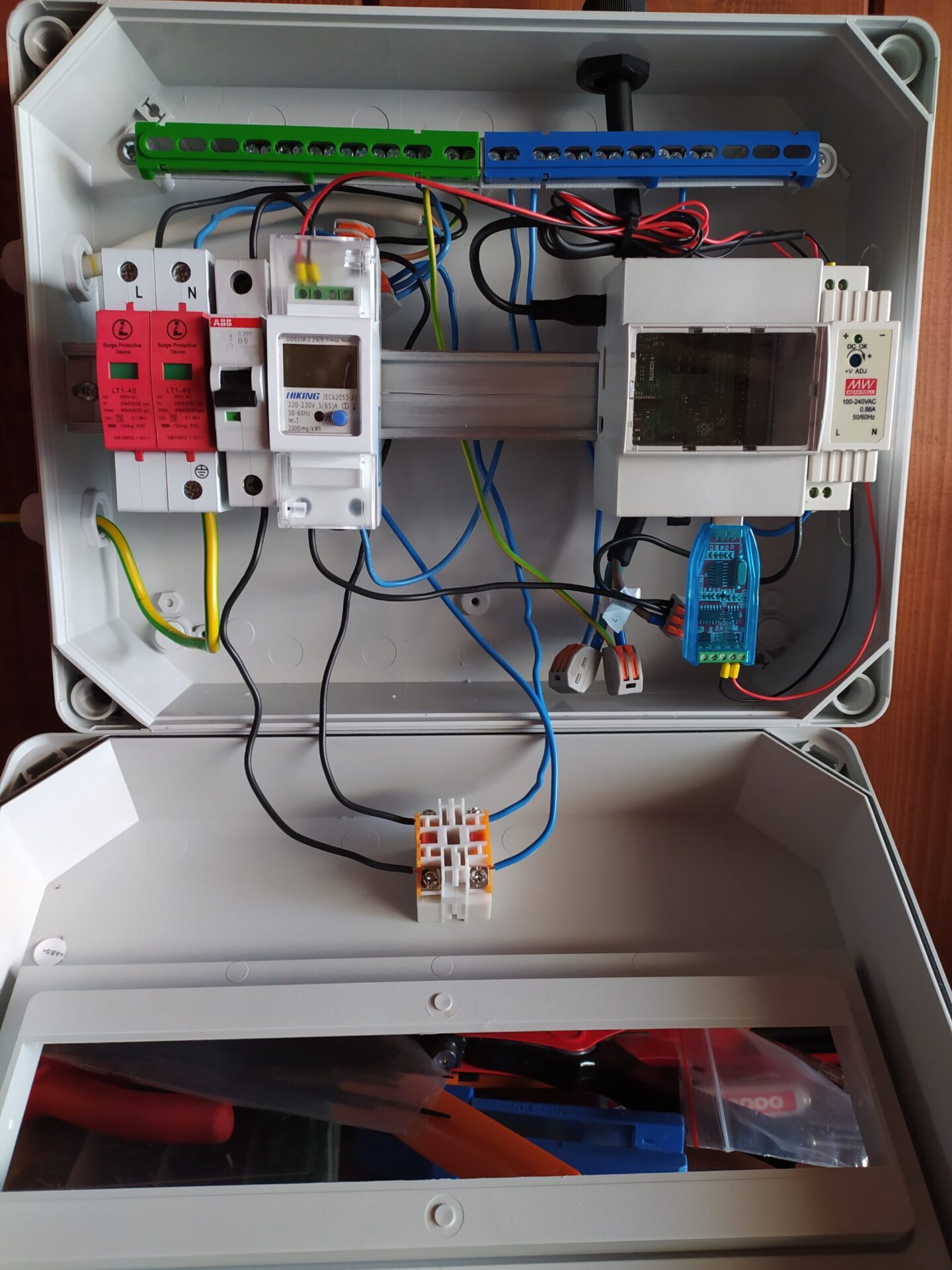
Elektronikumbau:
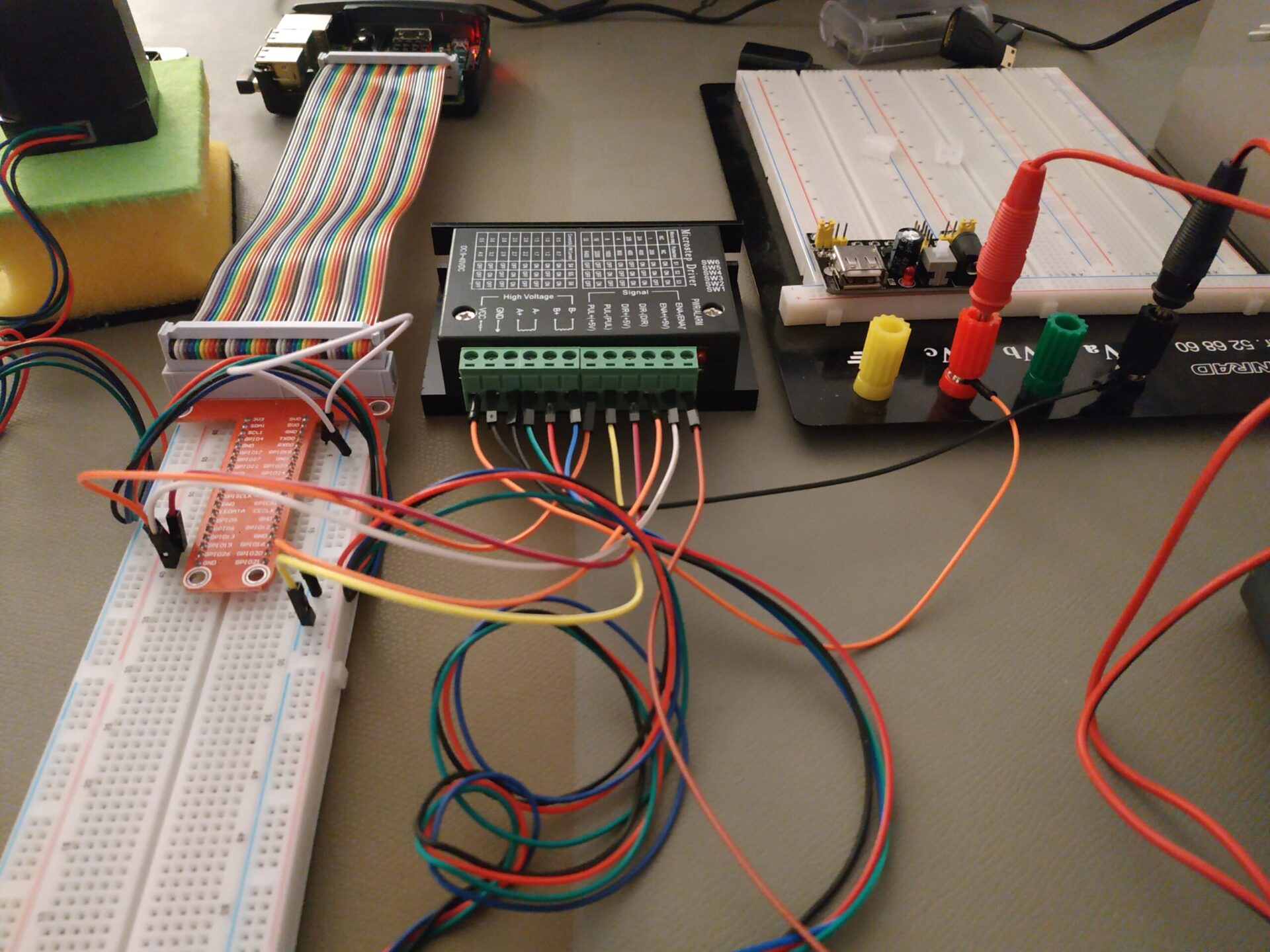
Am Wechselrichter bleibt bis auf die Beschaltung alles gleich. Der Sicherungskasten erfährt aber ein klares Upgrade. Neben dem Raspberry mit Hutschienengehäuse und einem entsprechenden 5V-Netzteil gibt es den RS-458- USB Adapter vom Versuchsaufbau. Leider hat sich ein anderer Kandidat als Reinfall erwiesen, daher bleibt es beim funktionierenden Testadapter. Überspannungsschutz und Sicherung kommen aus der „alten“ Box. Der Schalter an der Frontseite wird durch eine Variante ersetzt, der Phase und Nullleiter unterbricht (bei guter Anlagenleistung haute der alte, der nur die Phase trennte, sonst den FI-Schutzschalter raus).
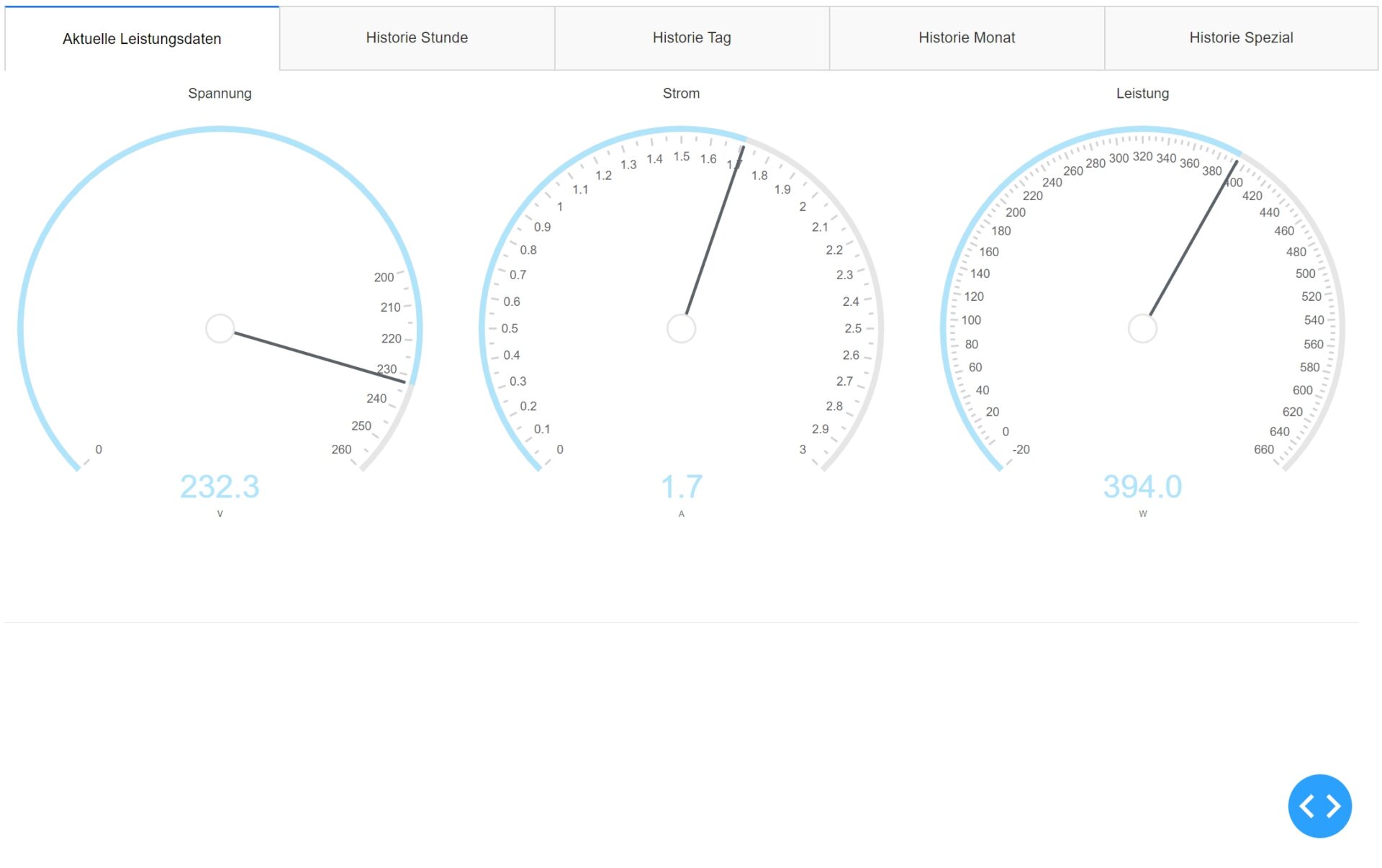
Software:
Hier gibt es einige Neuerungen. Aus dem vorhandenen Testskript in Python wurde ein Skript zur regelmäßigen Speicherung von Daten in eine SQLite-Datenbank. Erfasst werden Spannung, Strom und Leistung alle 15 Sekunden, die Zählerstände jede Stunde. Ein zweites Skript holt sich die Daten aus der Datenbank und visualisiert diese über Plotly Dash in verschiedenen Ansichten per internen Mini-Webserver. Beide Skripte sind in Python3 realisiert und als Services in Betriebssystem konfiguriert und starten damit automatisch.
Datenbank:
Durch die Verwendung der Datenbank bin ich nun flexibel in der Auswertung. Die Lösung erzeugt etwa 1/2 MB pro Tag an Daten und ist dabei mehr als ausreichend schnell. Mit dem vorhandenen Speicher kann ich sehr lange Daten anhäufen bis es eng wird. Auch sind kleinere Änderungen sehr schnell implementiert und auch die Verwendung in Excel ist mit Tools gar kein Problem. Lediglich die vergleichsweise häufige Nutzung der Speicherkarte könnte nochmal Ärger machen. Aber das lasse ich erst mal auf mich zukommen.
Entwicklungsumgebung:
Obgleich das natürlich auch einfach mit einem Editor wie z.B. Notepad++ klappt, arbeite ich lieber mit PyCharm. Die IDE erlaubt mir sehr viele Tätigkeiten viel komfortabler zu machen als mit (vielen) anderen Tools. Up-/ und Download von Dateien ist vollintegriert, das lokale Git-Repository ebenfalls.
Integriert ist der Interpreter mit Paketmanagement (auch Remote), ein Debugger, ein Tool für den Zugriff auf die Daten der Datenbank und manches mehr. Native Sprachunterstützung für Python zur Syntaxprüfung, Formatierung, Überarbeitung und Dokumentation sind natürlich auch dabei.
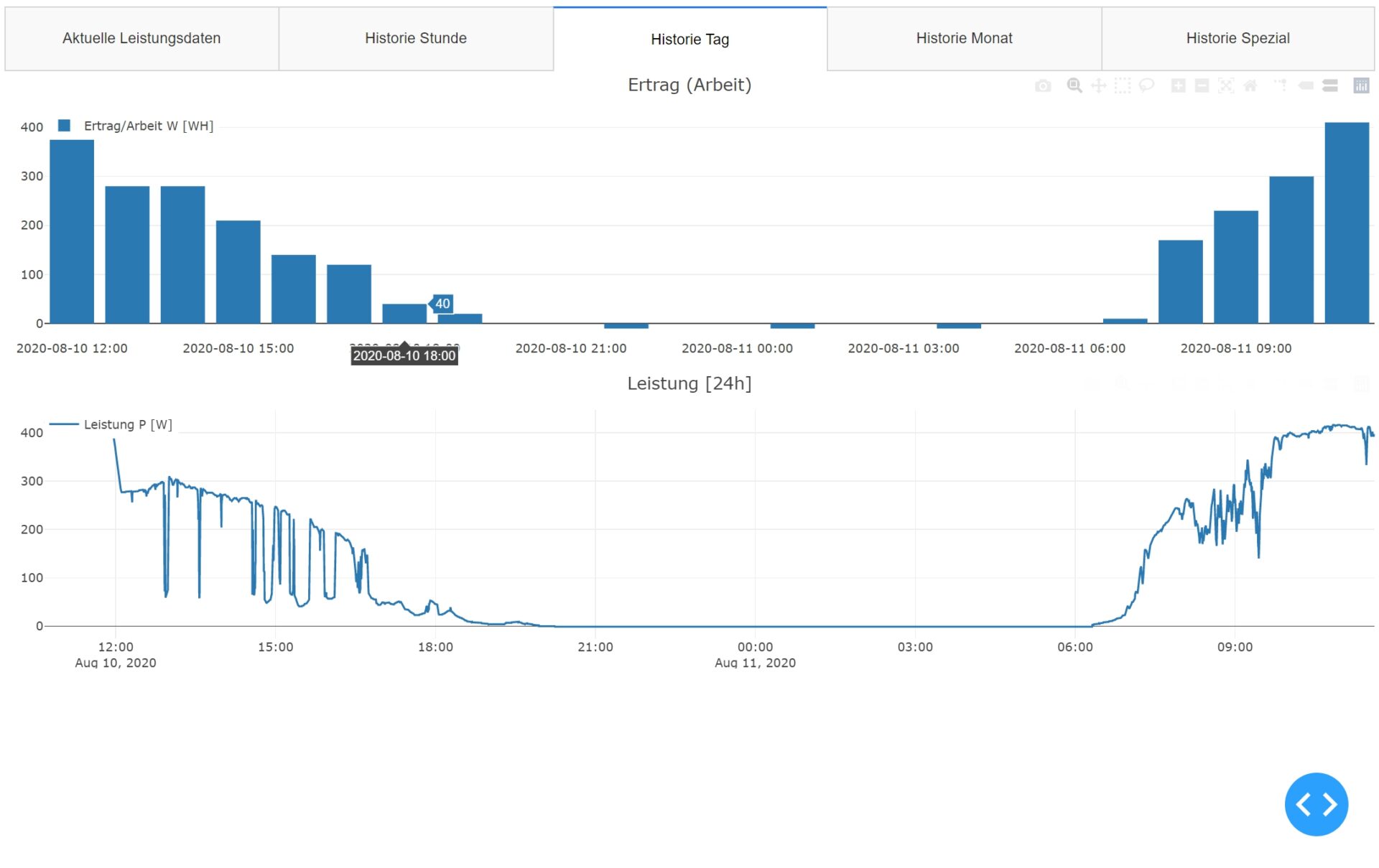
Anlagendaten:
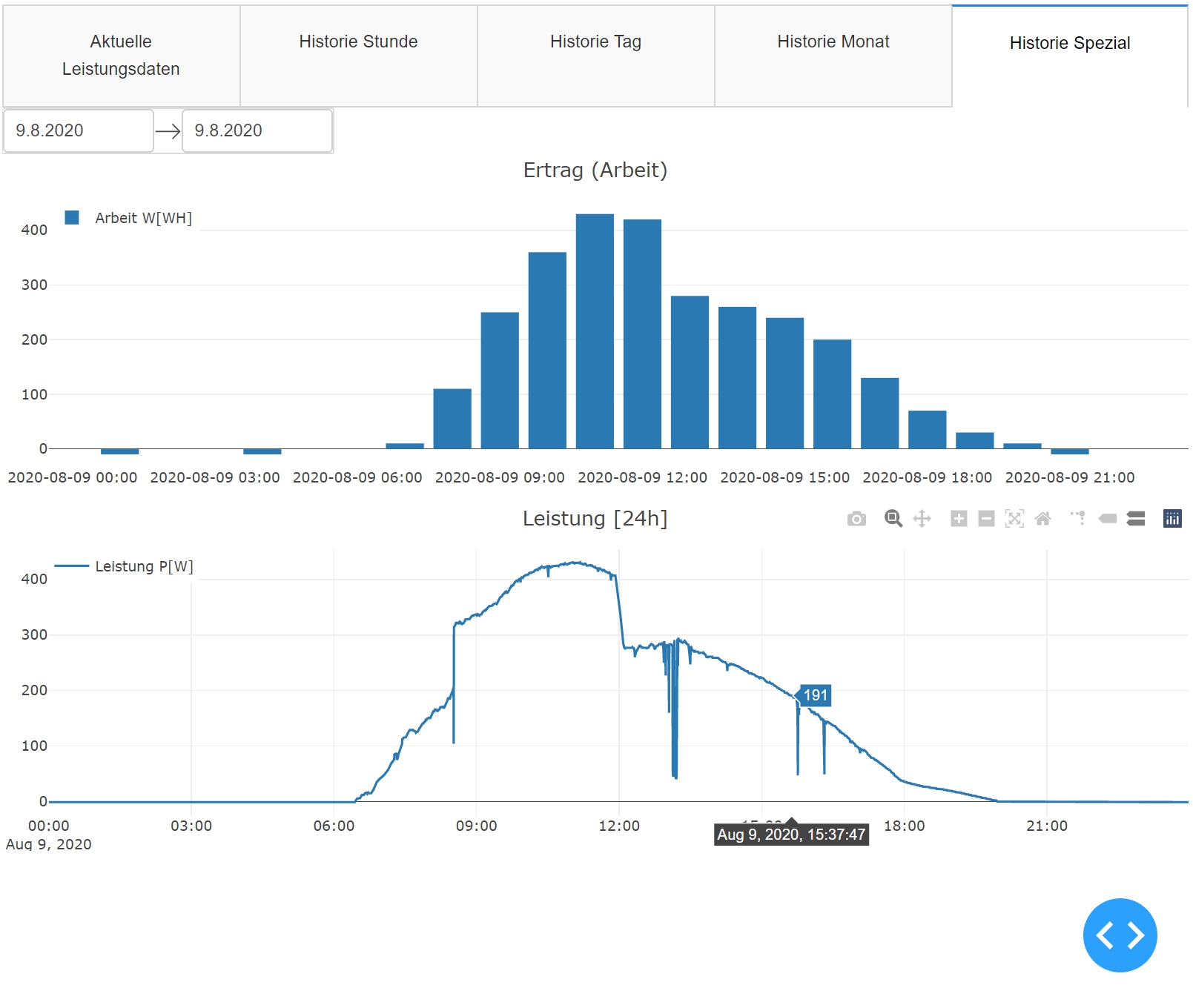
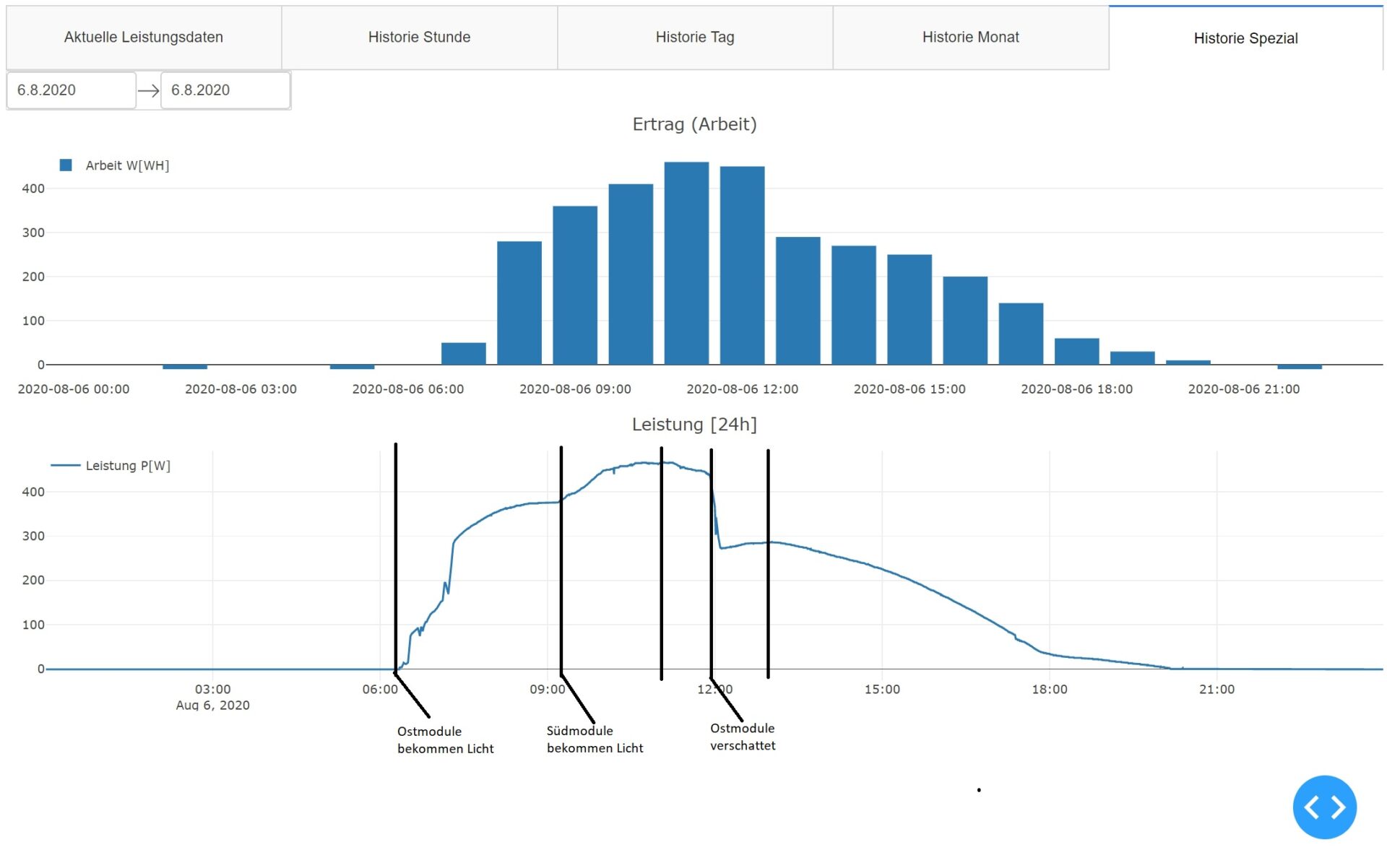
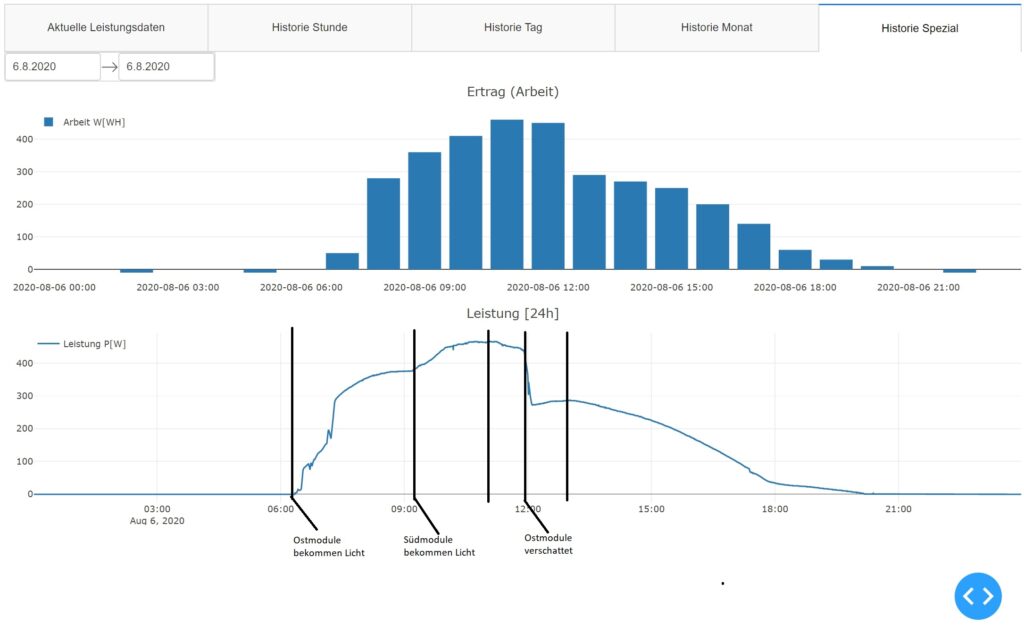
Zuerst mal war es doch überraschend, wie gut sich der neue Aufbau (im August) macht. Die Anlage fängt früh (ca. 6:30) mit den beiden Ostmodulen an und verbessert sich über den Vormittag mit dem Sonnenstand. So etwa ab 9 Uhr bekommen die Module auf der Südseite auch das erste (indirekte) Licht und geben anteilig Leistung dazu. Das Ganze steigert sich bis etwa 11 Uhr, wenn die Ostmodule wohl am besten ausgerichtet sind und sie Südseite trotzdem schon Sonne schnuppert. Dann geht die Leistung wieder zurück bis etwa 12 Uhr, wenn die Ostmodule verschattet werden. Der Einbruch ist in den Diagrammen schön sichtbar, danach liefern die Südmodule mit Direkteinstrahlung und die Ostmodule nur noch indirekt dazu. Um etwa 13 Uhr zeigt sich ein weiterer Peak, wenn die Südmodule am besten stehen und danach geht es kontinuierlich bergab mit dem weiter wandernden Sonnenstand.
Könnte ich im Osten auch noch Module platzieren, könnte ich hier eine vergleichbare Lösung für die Nachmittags- und Abendsonne bekommen. Aber dann kann ich nicht mehr in den Carport fahren, und das wäre dann auch wieder doof.
Durch die Visualisierung kann ich nun sehr komfortabel in die Anlage „reinschauen“ und sehe in einer bisher nie dagewesenen Granularität, was passiert. Es war z.B. sehr schön erkennbar als ein vergessener Gartenstuhl auf der Wiese am Morgen die Ostmodule teilweise beschattete. Auch sind Wolkenverschattungen sehr schön zu erkennen und natürlich auch andere Wettereinflüsse. Auch neue Rätsel finden sich nun, z.B. hat die Anlage beim Aufreißen der Wolken plötzlich die Maximalleistung des Wechselrichters erreicht und ein Paar Minuten gehalten. Da war wohl wirklich kurzzeitig überproportional viel Sonneneinstrahlung auf die Module geraten.
Ertrag und Nutzung:
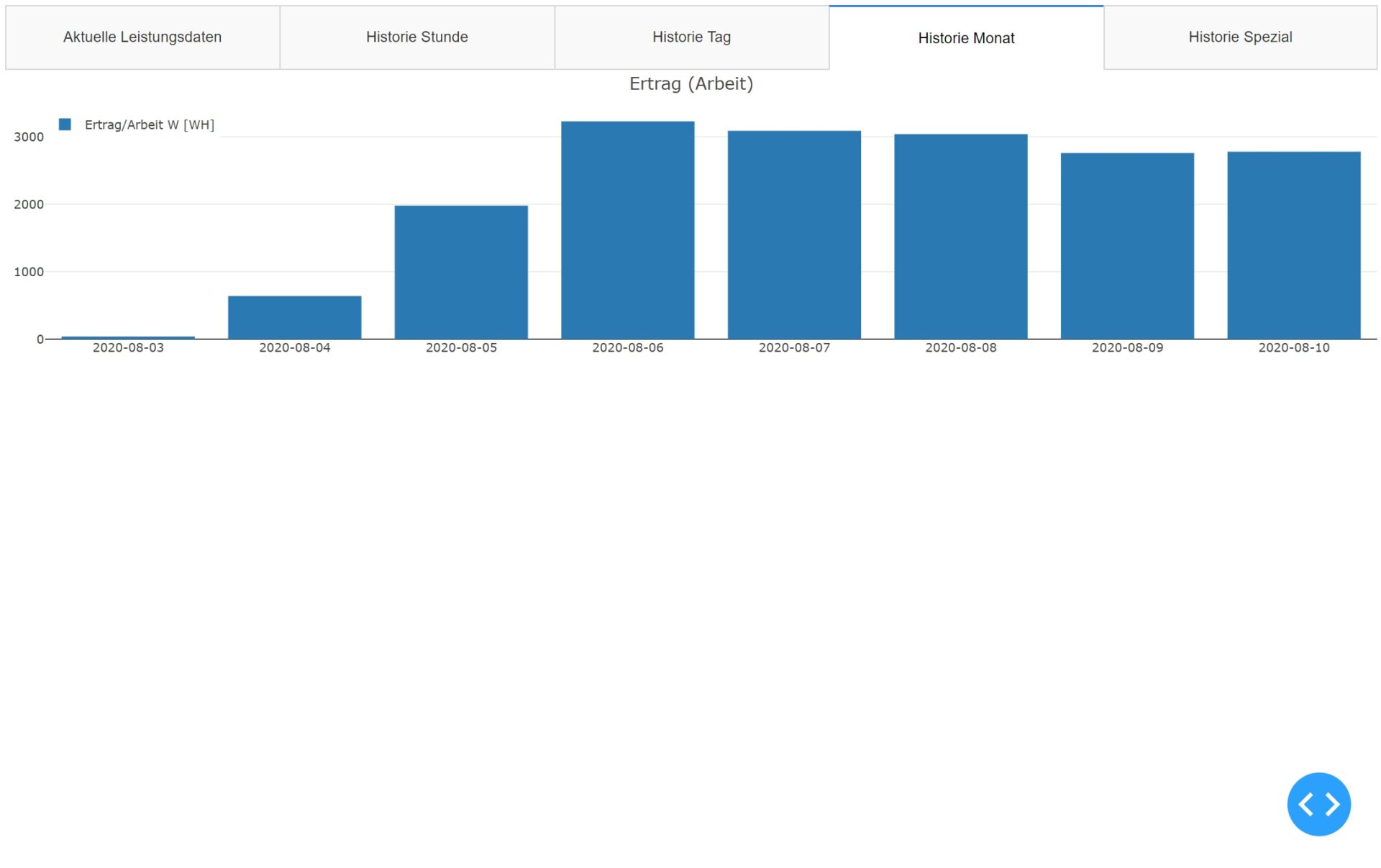
Die Anlage liefert in Summe über den Tag weniger als eine auf Ertrag optimierte Dachanlage. Da ich aber keine Einspeisevergütung bekomme (und die Anlage auch zu klein dafür ist), liegt mein Szenario bei der Abdeckung der Grundlast. Aktuell benötige ich hier ca. 300- 400W kontinuierliche Leistung, und die kann die Anlage bis zum frühen Nachmittag bei entsprechendem Wetter liefern. Mit der noch offenen Aufständerung nach Süden sicher noch länger. Aktuell hat die Anlage 164 KWh erzeugt (alleine 18 davon in den letzten 6 Tagen), 3 KWh davon gingen in Summe ins Netz. Damit sollte die Dimensionierung eigentlich passen mit etwas Luft nach oben.
Fazit:
Nun macht das Ganze wieder mehr Spaß. Neben der Tatsache, das die Anlage immer besser arbeitet, speichert sie nun auch die wichtigsten Daten zur Analyse. Wenn mir wieder mal eine Frage im Kopf rumspukt, kann ich nun die Daten z.B. in Excel entsprechend aufarbeiten oder direkt in die Software eine entsprechende Visualisierung reinbauen. Jetzt fehlt nur noch das Aufständern im Süden und die saubere Verkabelung, dann sollte das Teil so passen.
Überlegungen:
Nachdem der Testaufbau zum Auslesen der Anlagendaten per RS-485 endlich funktioniert, geht es nun der Anlage an den Kragen.