Quadrocopter – Summbrummsel – Phase 2
Der im letzten Jahr provisorisch aufgebaute Quadrocopter hat sich nun erheblich weiter entwickelt. Grund genug mal wieder was drüber zu schreiben und die aktuellen Erfahrungen zu teilen. Fertig ist das Teil natürlich immer noch nicht, wird es aber wohl auch nie werden. Dazu findet sich immer noch was dran zu machen.
Nach den ersten Testflügen der Phase 1 wurde der Quadrocopter wieder komplett zerlegt und neu aufgebaut. Ziel war es hier neben dem eigentlichen Aufbau schon mal einen späteren Umbau zum Hexacopter zu berücksichtigen.
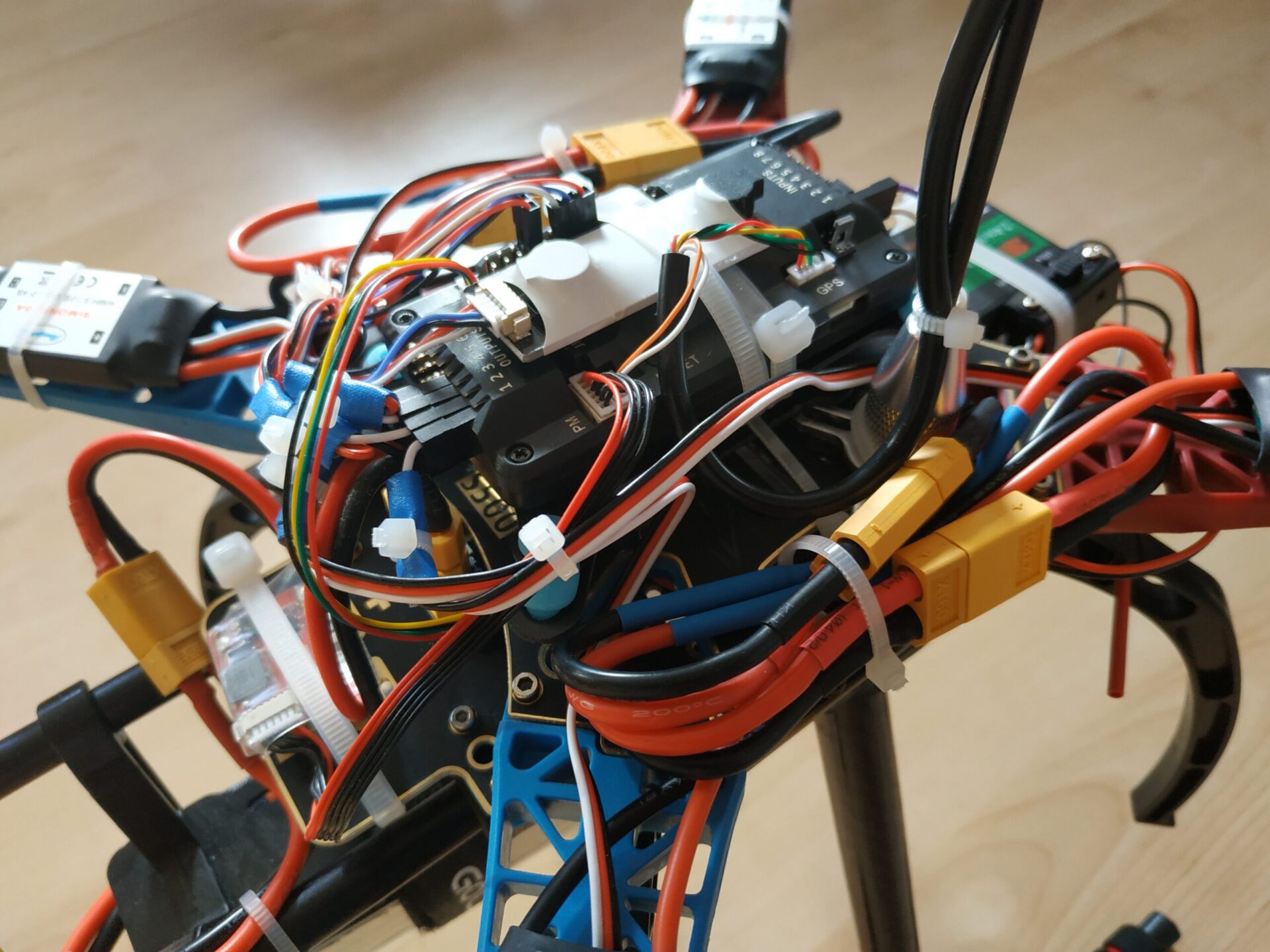
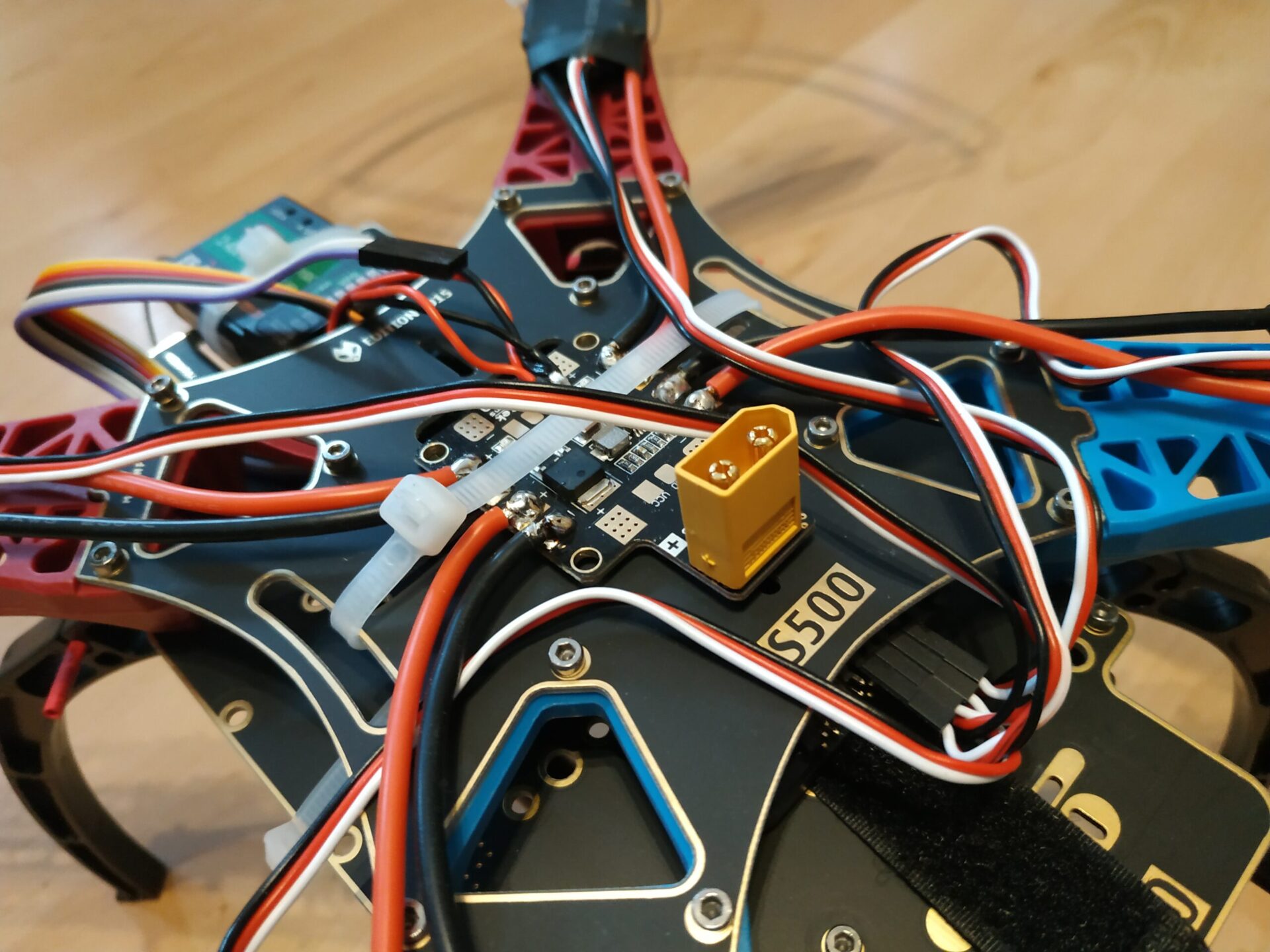
Am zentralen Stromverteiler sind erstmals XT60-Stecker angelötet worden (damit die ESCs sich wieder ohne Lötarbeiten lösen lassen). Auch die Stromversorgungen 12V und 5V haben nun passende Stecker.
Das Teil ist nun in der unteren Ebene auf der Basisplatte montiert.
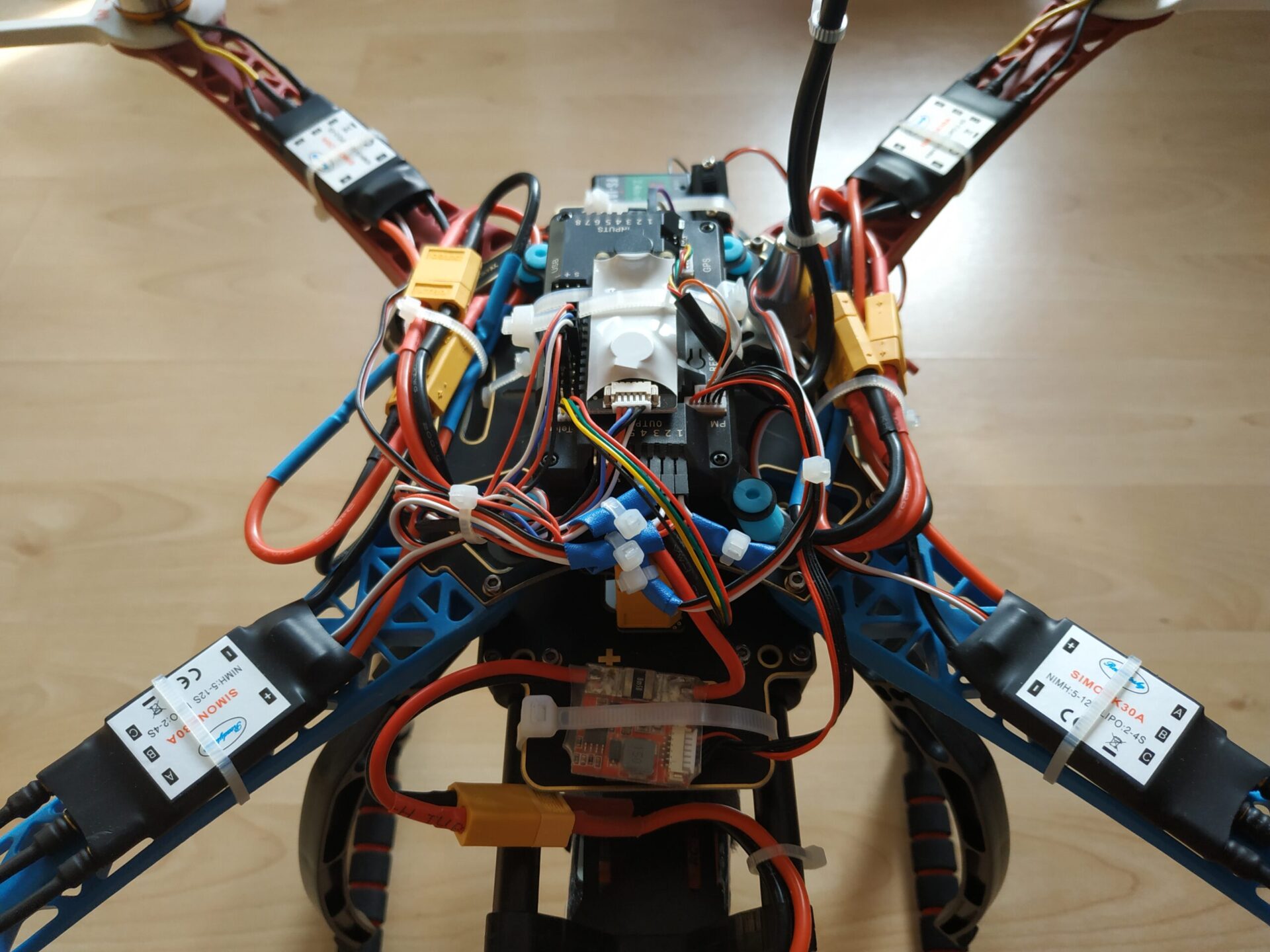
Die ESCs haben entsprechende XT60-Verbinder erhalten und die eingebauten BECs sind nun abgeklemmt um Störungen in der Stromversorgung zu vermeiden. Die Position der ESCs auf den Armen hatte sich bewährt und wurde nicht geändert. Leider sind durch die eingelöteten Verbinder die Kabel zu lang. Da ich wegen der Umbaufähigkeit die Kabel nicht ablängen will, sind die erstmal seitlich an der Montageplatte fixiert. Nicht sehr schön, aber ok.
Die Motoren und Propeller sind unverändert (A2212 1000KV mit 1047 Propellern). In der Theorie erzeugt jeder Motor damit 800g Schub bei Vollast, in Summe also 3200g.
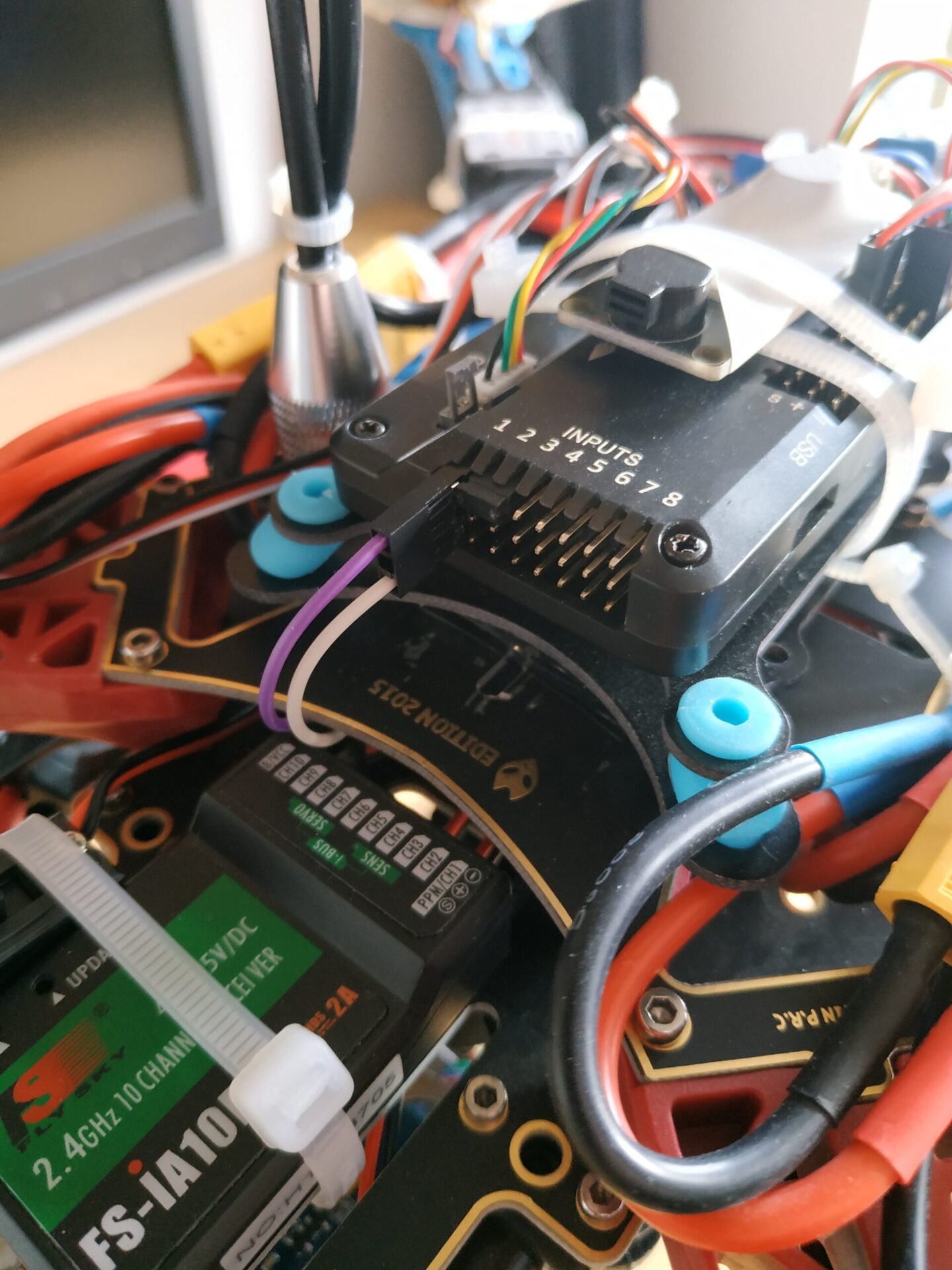
Der Fernsteuerungsempfänger findet sich nun auch auf der unteren Ebene und wird durch den BEC mit 5V über einen eigenen Schalter versorgt. Die beiden Empfängerantennen sind in die „alten“ Standfüße im 90° Winkel gesteckt.
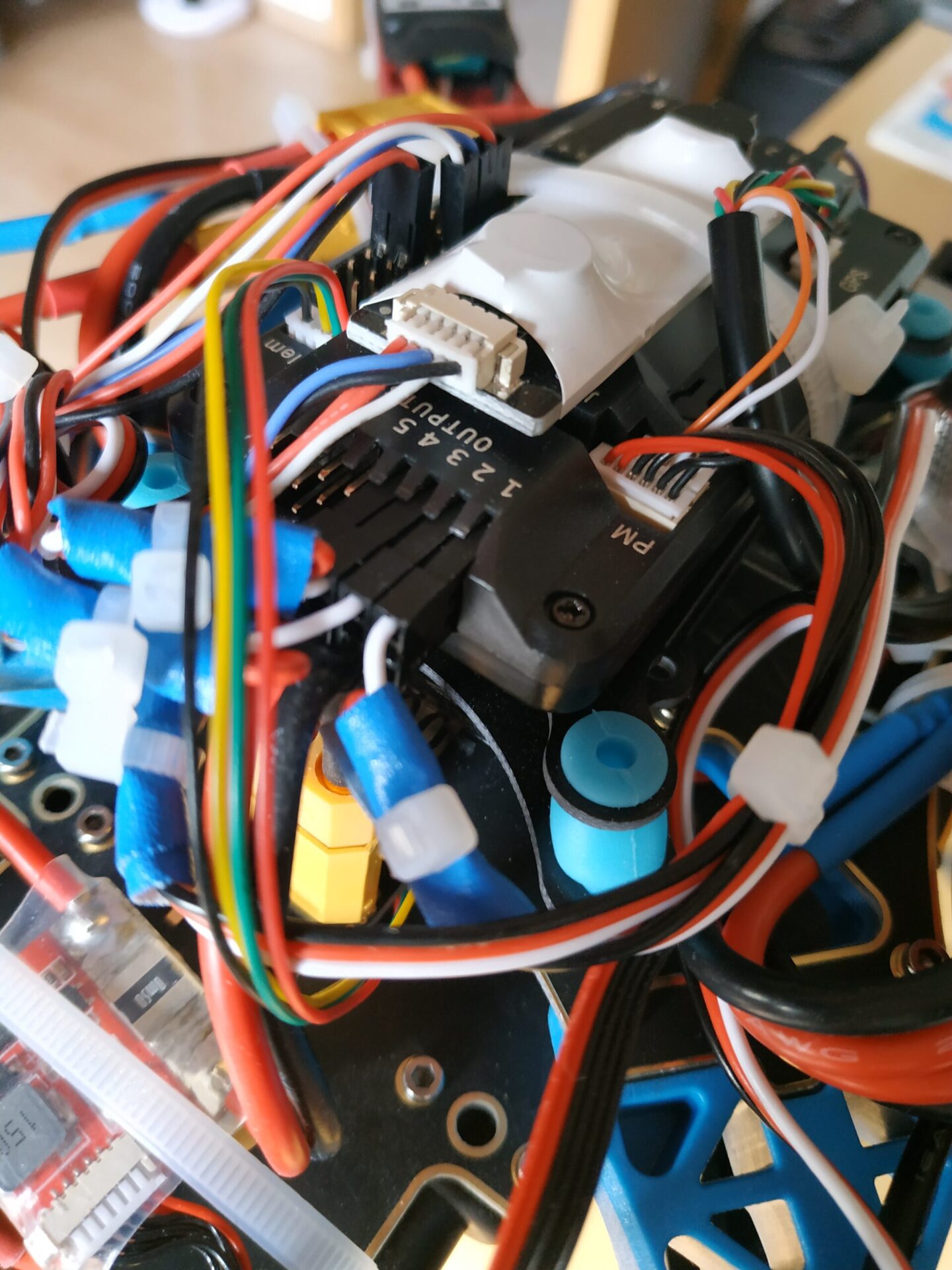
Der Flugrechner befindet sich nun auf einer eigenen Platte mit Schwingdämpfern ganz oben. Die Ansteuerung der ESCs hat nur noch die Pins für Signal und Masse (um die Versorgung über die BECs der ESCs zu vermeiden).
Der Fernsteuerempfänger arbeitet nun nur noch mit PPM (also nur ein Kabel für alle Kanäle. Leider scheint die Ardupilot-Firmware 3.2.1 nur 8 Kanäle verarbeiten zu können, daher werden 2 Kanäle der Fernbedienung nicht unterstützt.
Die Stromversorgung des Flugrechners erfolgt über ein entsprechendes Power-Modul und erlaubt auch eine „grobe“ Messung der Versorgungsspannung und der aufgerufenen Stromstärke.
Der Akku hängt nun an der korrekten Stelle und wurde durch ein Modell 3S, 5000 mAh ersetzt. Damit können nun ca. 10 Minuten Flugzeit erreicht werden.
Neue Komponenten:
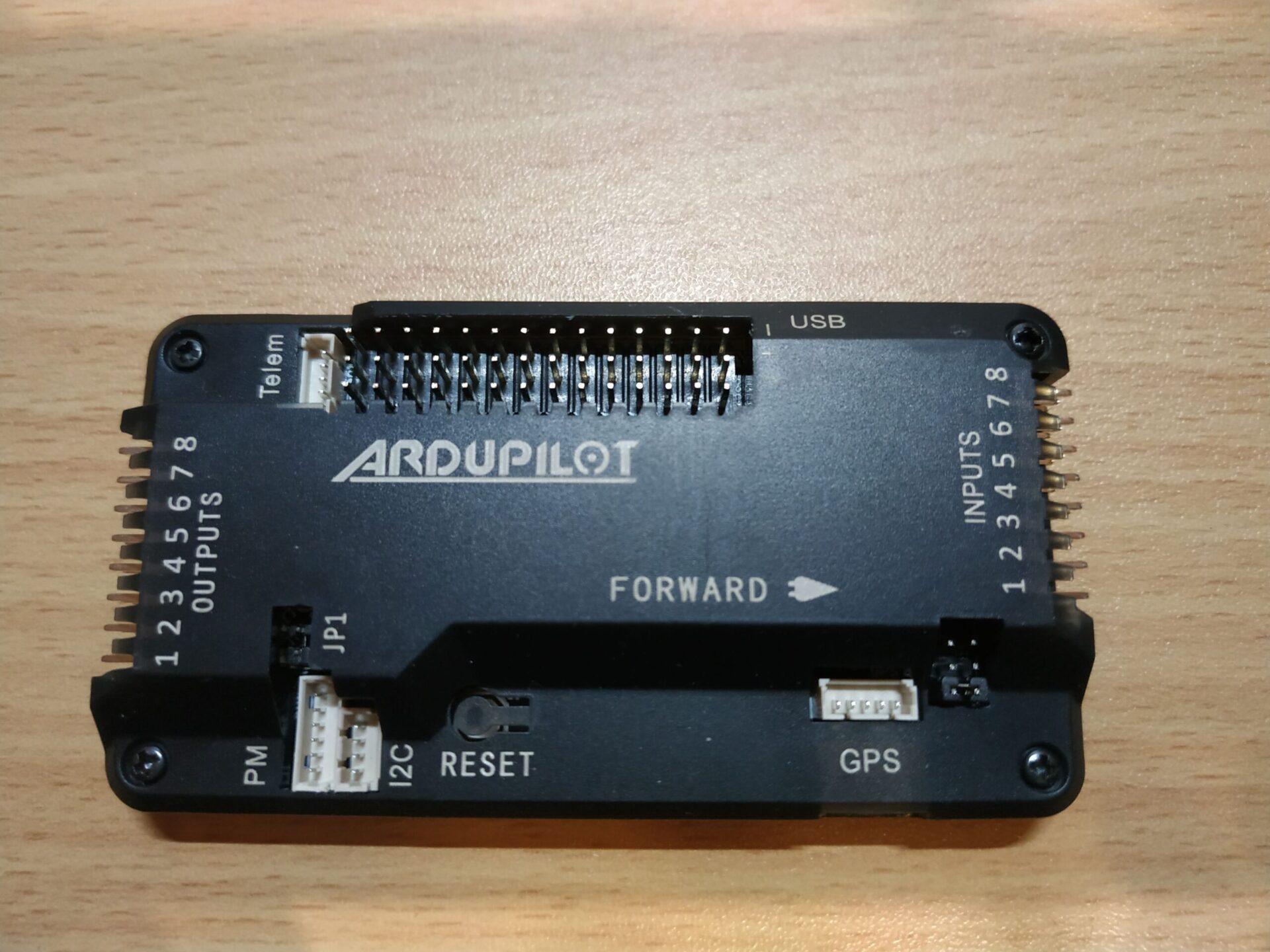
Ein GPS-Empfänger mit eingebauten Kompass findet sich nun auf einer Aufständerung erhöht am Quadrocopter. Damit lassen sich nun auch die „intelligenteren“ Flugmodis nutzen wie z.B. „Loiter“. Um den Kompass richtig nutzen zu können, mussten am Flugrechner Lötbrücken umgelötet werden damit der I2C-Bus an den Steckern verfügbar wird (Standard ist dort eine serielle Schnittstelle).
Am Boden des Quadrocopter wurde eine Telemetrieeinheit befestigt und mit dem Flugrechner verbunden. Über einen entsprechenden USB-Stick am Rechner kann nun auch während des Flugs per Missionplaner auf die Drohne zugegriffen werden.
Ein 2-Achsen Gimbal erlaubt es nun, eine Actioncam in Flugrichtung gerade (horizontal) auszurichten. Auch der Gimbal ist schwingend befestigt um die Motorvibrationen nicht zur Kamera durchzuleiten und wird über 12V vom BEC versorgt. Theoretisch können die Achsen per PWM-Signal gesteuert werden, ist aber derzeit nicht der Fall (auch weil ein Drehregler am Sender scheinbar defekt ist).
Als Kamera wird eine Eken H9 im Gimbal betrieben, die für mich vorerst eine preisgünstige Alternative zu z.B. einer GoPro ist. Mit einem eingebauten Akku und Speicherkartenunterstützung absolut ausreichend.
Die Drohne hat nun einiges Zeug unten dran hängen, was mit den kurzen Stelzen in einer Wiese schnell zu Feuchtigkeit im System führen kann oder zu Nahaufnahmen von Marienkäfern auf Grashalmen. Deshalb sind nun zwei Teleskopstelzen ergänzend zu den „alten“ Ständern montiert, die nun Gimbal und Akku aus der Wiese halten. Die „alten“ Ständer sind ein ganz guter Prallschutz für die Komponenten und bleiben erst mal drin.
Oben am Flugrechner ist nun auch ein Statusmodul montiert mit LEDs für GPS-Fix, Arm-Status und einen Buzzer für Alarmmeldungen. Alles davon hat sich schon praktisch bewährt und ist uneingeschränkt zu empfehlen.
In der Stromversorgung ist unmittelbar nach dem Akku ein Pufferkondensator verbaut. Es soll später ja noch ein FPV-System dazu kommen, das unbedingt eine recht stabile Versorgung braucht. Leider sind die ESCs als Ursache für Störungen in der Spannungsstabilität berüchtigt, daher die Stabilisierung durch den ESR-Pufferkondensator.
Einrichtungsarbeiten:
Fernbedienung und Glugrechner sind auf PPM-Betrieb umzustellen.
Die Kanäle sind auf entsprechende Funktionen einzustelllen, leider an der Fernbedienung da die Ardupilot-Firmware das Mapping der Kanäle noch nicht unterstützt.
Flugmodis sind entsprechen der Schalterstellungen zuzuordnen (derzeit Loiter, Stabilization und Land).
Der externe Kompass im GPS-Empfänger und der interen scheinen nicht zeitgleich angesteuert zu werden, dazu machte der externe auch Probleme (sh. Video) und driftete. Vorerst bleibt es also beim internen.
Fernsteuerung, Kompass und Beschleunigungssensoren sind wieder (und wieder) zu kalibrieren. Hier würde eine neuere Firmware auch eine Verbesserung bringen, mit dem APM2.8 aber nicht möglich.
Das Power-Modul muss per Referenz-Messung kalibriert werden. Bei der Spannung geht das mit Hausmitteln, der Strom ist vorerst noch nicht möglich und die Messwerte damit nur zur Orientierung und bei kleiner Last ohnehin Schrott.
Das Feintuning der Einstellung (z.B. Schub zum Halten der Höhe) wird noch vertagt (sh. unten), scheinbar sind die Grundeinstellungen vorerst hinreichend.
Die Drohne hat deutlich an Gewicht zugelegt (1,9Kg). Das ist mehr als empfohlen, aber noch ok. Vielleicht wird später nicht benötigtes Zeug wieder abgebaut, z.B. die alten Stelzenfüße oder überlange Kabel und unnötige Verbinder. Ansonsten wäre das Leistungsgewicht bei einem Umbau auf einen Hexacopter-Frame auch wieder besser.
Flug und Erfahrungen:
Beim ersten Start war die Kalibrierung unzureichend und die Drohne ist unruhig gestartet und driftete im Loiter-Modus ab. Im Stabilization-Modus war der Flug gut möglich, man merkte im Vergleich zum Erstflug mit Mindestausstattung schon das zusätzliche Gewicht. Auch ist das Gerät lauter geworden.
Nach einer neuen Runde Kalibrierung war das Symptom vom Wegdriften weg, dafür ging der Alarmbeeper nach wenigen Sekunden los. In den Logs findet sich ein Fehler „FAILSAFE_BATT“ als Ursache.
Scheinbar bricht die Versorgungsspannung am Lipo auf ca. 9,5V ein (Nennspannung 11,1V). Die Versorgung scheint aber stabil genug zu sein um weitere Experimente zu wagen. Der Akkuwarner schlägt normal nach einigen Minuten zu, also entweder ein Problem mit dem Spannungssensor, der Lastfähigkeit des Akkus oder der Kabelage. Hier ist wohl eine genauere Messung im Teststand notwendig.
Der Kompass scheint im neuen Aufbau auch Probleme zu haben. Der im GPS neigt zum driften, der interne ist wohl stärker gestört als vorher. Im Video sieht man eine Tendenz zum Drehen als Folge daraus.
Ein erneuter Versuch zeigt aber schon eine recht gute Fluglage im Loiter-Modus (siehe Video, mit leichten Windböen). Damit geht es nun an die Ursachenforschung für die Problemfelder Spannung, Kompass und ans Feintunen.
Das Thema Drohne hat sicher noch Potential für einige Artikel.
Komponenten:
Frame: S500
ESC: ReadytoSky 30A SimonK (4x)
Motors: A2212 KV1000 (4x)
RC Sender: FlySky FS-TM10
RC Empfänger: FlySky FS-IA10B
Flugrechner: APM2.8
Firmware: Ardupilot 3.2.1
Überlegungen:
Ohne GPS funktionieren viele Dinge nicht (wie. z.B. der Loiter-Mode), muss also rein.
Der kleine Akku war für die fette Hummel eindeutig zu klein, also Upgrade.
Ohne Gimbal macht eine Kameradrohne keinen Sinn.
Das Status- und Alarmmodul war ja schon bei den ersten Flügen als sinnvoll erkannt worden.
Mit der tieferen Einarbeitung in die Software hat sich ein Telemetriemodul als sinnvoller Kandidat gezeigt, um online auf die Betriebsparameter zugreifen zu können.
Schingdämpfer sind toll, in manchen Punkten sogar essentiell.
Schäden:
– Eine Menge Kabelbinder und Teppichklebeband beim Umbauen mehrfach verbraucht.
– An der Fernsteuerung scheint einer der Drehregler (schon immer?) defekt zu sein.