Hexapod – Roboter mit Schüttellähmung
Nachdem nun alle Teile im Haus sind und der Aufbau erst mal fertig ist, geht es daran die Bewegungen richtig in das System zu bekommen. Wie zumeist gibt es auch hier wieder viele Details zu klären und manchmal auch fundamentale Momente von B*******.
Projekt: Hexapod 12 DOF
Kontakt: Boris Dirnfeldner
Link: – eigenes Projekt –
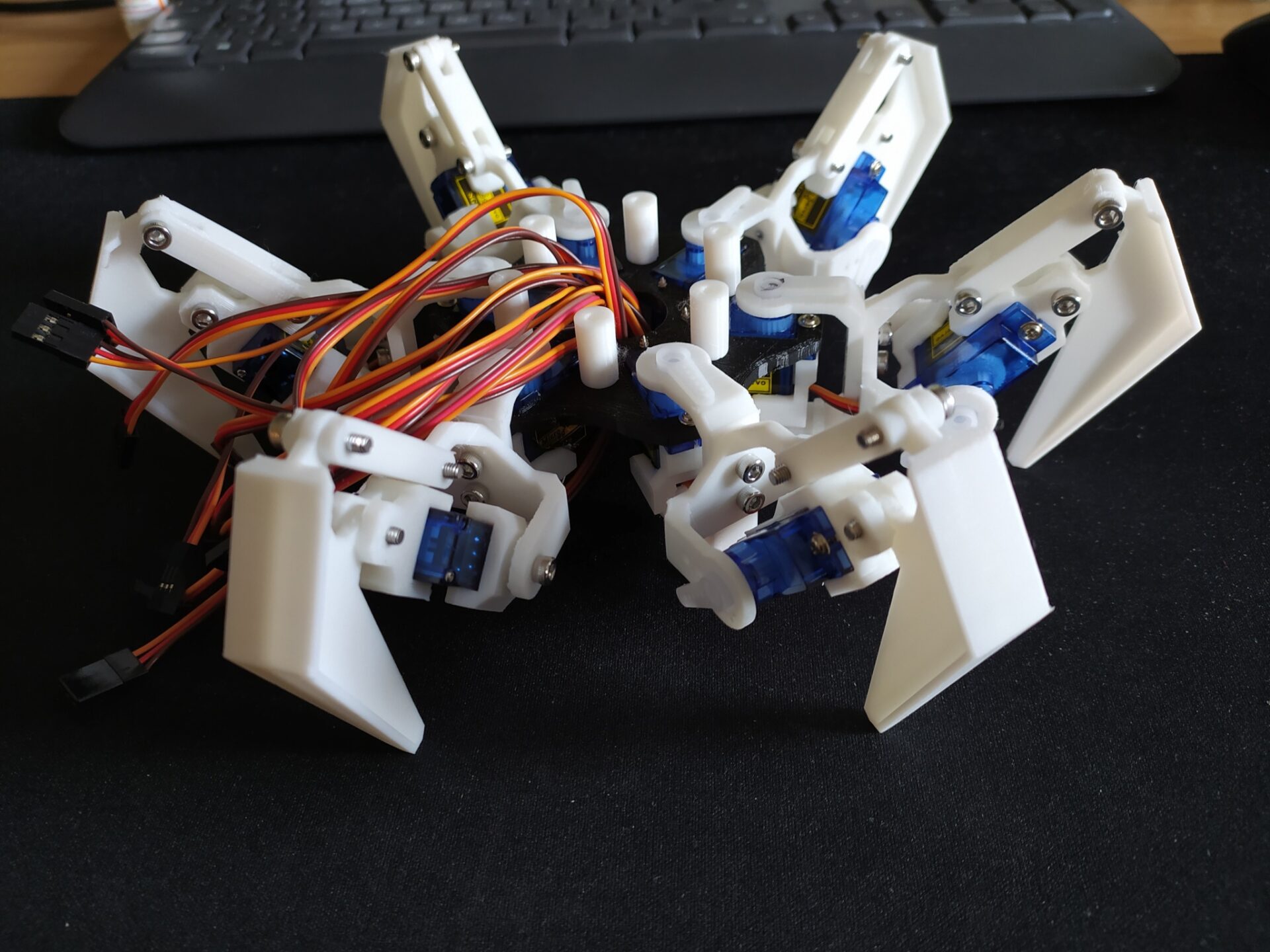
Mit den inzwischen angekommenen Schrauben ist die Mechanik schnell fertig aufgebaut und funktioniert auch wie erwartet. Alle Beine haben etwas Spiel, sind aber trotzdem recht gut geführt. Die Servos sitzen sicher und die Elektronik ist provisorisch fixiert. Die Deckplatte habe ich aber nicht festmontiert, da der Kabelbaum von den Servos recht hoch aufträgt und sonst an ein oder zwei Servoarmen scheuern würde. Vorerst aber gut genug.
Mit dem Uno bin ich zunehmend unglücklich. Zwar scheint er noch genug Leistung zu bringen um die Steuerung zu leisten, aber wenn ich dazu Kommandozeilen-Befehle nutze kackt mir das System ab. Nach inzwischen 3 Tagen Versuch und Irrtum, einem komplett neu aufgebauten Modul ohne Fremdcode und viel Frust habe ich davon die Nase voll. Wo immer das Problem ist, es tritt erst auf mit der Kommandozeile, und da finde ich nix mehr. Irgendwo gibt es eine Querwirkung, aber mit der Arduino-Entwicklungsumgebung bekomme ich kaum Hilfe bei der Suche. Perverserweise funktioniert alles auf dem ESP32 ohne Probleme, daher verabschiede ich mich vom Uno früher als geplant. Ohnehin war er schon ziemlich ausgelastet und der Umzug auf den ESP32 auch schon klar, daher spare ich mir die Zeit den Uno hier stabil zu bekommen. Daneben zeigt sich beim Uno auch, dass die Initialisierung des Servocontrollers zu merkwürdigen Ausschlägen bei den Beinen führt. Nicht so beim ESP32. Also weg damit.
Mit den ersten Versuchen und Bewegungen zeigen sich auch Schwächen des gewählten Modells und der ersten Steuerungsversuche. Die verwendeten 9g-Servos sind klein, leicht und billig. Allerdings zeigt sich auch, dass die Mechanik mit der direkten Verbindung an den Servoarm zu Problemen führt. Bei schnellen Bewegungen fährt der Arm wohl über das Ziel hinaus und wird dann recht hart vom Servocontroller zurückgefahren. Dabei geht es dann in die andere Richtung mit dem gleichen Effekt. Im Ergebnis schaukelt sich das dann so stark auf, dass der Robot in Schüttellähmung mit sich selbst beschäftigt ist. Hier mal ein Video wie das dann aussieht:
Eigentlich macht alles was es soll. Da aber die Mechanik ziemlich Spiel hat unterstützt das halt solches Verhalten. Auch die Servos sind hier problematisch, da zwischen den beiden Regelpunkten kaum mechanischer Widerstand vorhanden ist. Das folgende Video zeigt gut das Verhalten im System. Wenn ich mit der Hand das Bein in eine Richtung in den Anschlag führe, drückt der Servo plötzlich dagegen. Das gleiche passiert in die andere Richtung. Im Video sieht man dann ein Ruckeln (wenn der Servo die zentrale Scheibe drückt) und hört den Servo anfahren. Durch den guten Hebel schafft das an sich recht leichte Bein diese Bewegung fast ohne Widerstand, und der starke Servoschub gibt dann Schwung in die Sache. Das lässt sich mit leichtem Anschlagen auch gut provozieren.
Hier muss ich also stärker dämpfen. Am Modell geht das zum einen natürlich durch langsame Bewegungen und durch stärker angezogene Schrauben. Hier wird wohl noch einiges an Try&Error notwendig sein. An den Hebearmen sieht man auch beim Einschalten, das die Servos das Gewicht gut stemmen können. Von der Dimensionierung her passt also alles soweit.
Die Steuerung arbeitet inzwischen auch mit Zwischenschritten zur besseren Kontrolle und auch um langsamere Bewegungen zu ermöglichen. Leider kann ich den Servos keine Stellgeschwindigkeiten vorgeben, daher muss halt die Software ausreichend Zwischenschritte einfügen. Dazu läuft im Hintergrund für jedes Gelenk eine Steuerung, die eine (vorerst) lineare Anpassung der PWM-Stellvorgaben berechnet und derzeit ca. 20-mal pro Sekunde anpasst (mehr konnte der Arduino Uno nicht mehr leisten). Das Servo arbeitet mit ca. 50 Hz, es gibt also noch Luft nach oben. Man hört und sieht auch, dass ein leichtes Ruckeln in den Bewegungen vorhanden ist. In der Software gibt es inzwischen auch Logik, um Bewegungssequenzen aneinander zu reihen und abarbeiten zu lassen. Natürlich nicht optimal, aber fürs erste ok.
Hier ein Video für eine einfache Testsequenz. Man sieht das kontrollierte Bewegungen an den Hebearmen im Vergleich schon gut gelingen.
Bei den ersten Gehversuchen hat sich auch gezeigt, das mit nur 12 Freiheitsgraden das Modell mechanisch zu eingeschränkt ist um flüssig wirkende Bewegungen zu erlauben. Die Beine können so nicht nach Außen oder Innen bewegt werden und rutschen so immer am Boden rum. Verstärkt wird das Verhalten auch durch die Platzierung der Beine, hier wäre es wohl besser eine rechteckige Grundform zu wählen und dann die Beine seitlich zu platzieren. Kommt auf den Merkzettel fürs nächste Modell.
Der Einfachheit halber werden die Servos aktuell mit einem 18650-er Schield von Wemos versorgt. Das ist zwar wegen den integrierten Lade- und Sicherungskomponenten schön, auch wegen des mechanisch kompakten Aufbaus, aber leider scheint die Wahl des 18650 ein Fehler zu sein. Beim Einschalten oder bei schnellen Bewegungen scheint hier die Last zu hoch zu werden und das Modul schaltet die Stromversorgung ab. Zwar meint das Teil bis zu 4A bei 5V liefern zu können (laut Aufdruck), aber richtig glauben will ich das nicht. Der Akku sollte typischerweise mit 1C belastbar sein, also mit bis zu 2,2A. Im Internet wird bei den Servos von ca. 200mA Strom gesprochen, in der Spitze sogar bis zu 600mA im Anschlag (also volle Leistung gegen ein Hindernis). Wenn da mehrere Servos gleichzeitig loslegen, kann ich mir schon eine Überlastung der Versorgung vorstellen. In der Praxis schaltet das Modul dann die Spannung fast komplett weg und benötigt dann einen „Neustart“ per Akku raus und rein. Lästig, aber ok zum Testen. Später muss ich wohl eine richtige Versorgung per Modellbau-Lipo etc. machen.
Fazit:
Es war ja eigentlich schon klar, dass der erste Versuch nicht so richtig gut sein wird. Das Modell sollte primär schnell druckbar und einfach aufgebaut sein. Im Nachhinein ist es zu einfach aufgebaut um wirklich flexibel zu sein, aber trotzdem ein guter Start. Die Probleme mit dem Arduino Uno sind leider auch nicht unerwartet gekommen. Und dass es bei komplexen Bewegungen Zeit benötigt um eine gute Lösung zu schaffen ist auch klar. Wer sowas schon mal angefangen hat, kann dies sicher gut nachvollziehen. Mit dem Modell wird jetzt erst mal weiter geprobt und Software als auch Mechanik zu einer gewissen Reife gebracht. Nächstes Jahr sehe ich aber eine neue Version kommen, dann mit 18 Freiheitsgraden, besseren Servos und auch mehr Hintergrund aus der aktuellen Runde.