DIY – Hexapod als neue Hausspinne
Ein schon langes geplantes Projekt, dass ich aber auch lange mangels Zeit verschieben musste, war ein Hexapod aus eigener Fertigung. Die Dinger sind einfach cool und die Steuerung dazu hat auch einen gewissen Reiz. Da ich derzeit pandemiebedingt deutlich mehr Zeit habe sollte ich endlich mal anfangen und das Teil auf den Weg bringen.
Projekt: Hexapod 12 DOF
Kontakt: Boris Dirnfeldner
Link: – eigenes Projekt –
Ziel:
Um sich an das Thema ranzutasten, soll es erst mal ein fertiges Modell aus dem reichen Fundus von Thingiverse.com sein. Da es primär dazu dient etwas Spaß zu haben und was dabei zu lernen, bleibt es kleines Modell mit Mikroservos und einfacher Elektronik. Wenn möglich, sollten Bestandsteile Verwendung finden.
Konzept:
Ein tolles Modell findet sich schnell hier. Das Modell Hexro von Nuttapon Poncharernpong bietet 12 Freiheitsgrade (2 Gelenke pro Bein, 6 Beine) und eine symmetrische Anordnung. Vorgesehen sind SG90-Servos die sehr günstig zu bekommen sind. Die Ansteuerung dazu kann ich mit einem PCA9685 Modul einfach bekommen. Als Controller ist erst mal ein Arduino Uno drin, später dann wahrscheinlich ein ESP32 (wegen dem WLAN-Interface). Stromversorgung soll über ein 18650 Li-Ion Akku mit einem fertigen Halter nebst Ladeelektronik funktionieren. Am Ende wäre das Ding also kabelunabhängig.
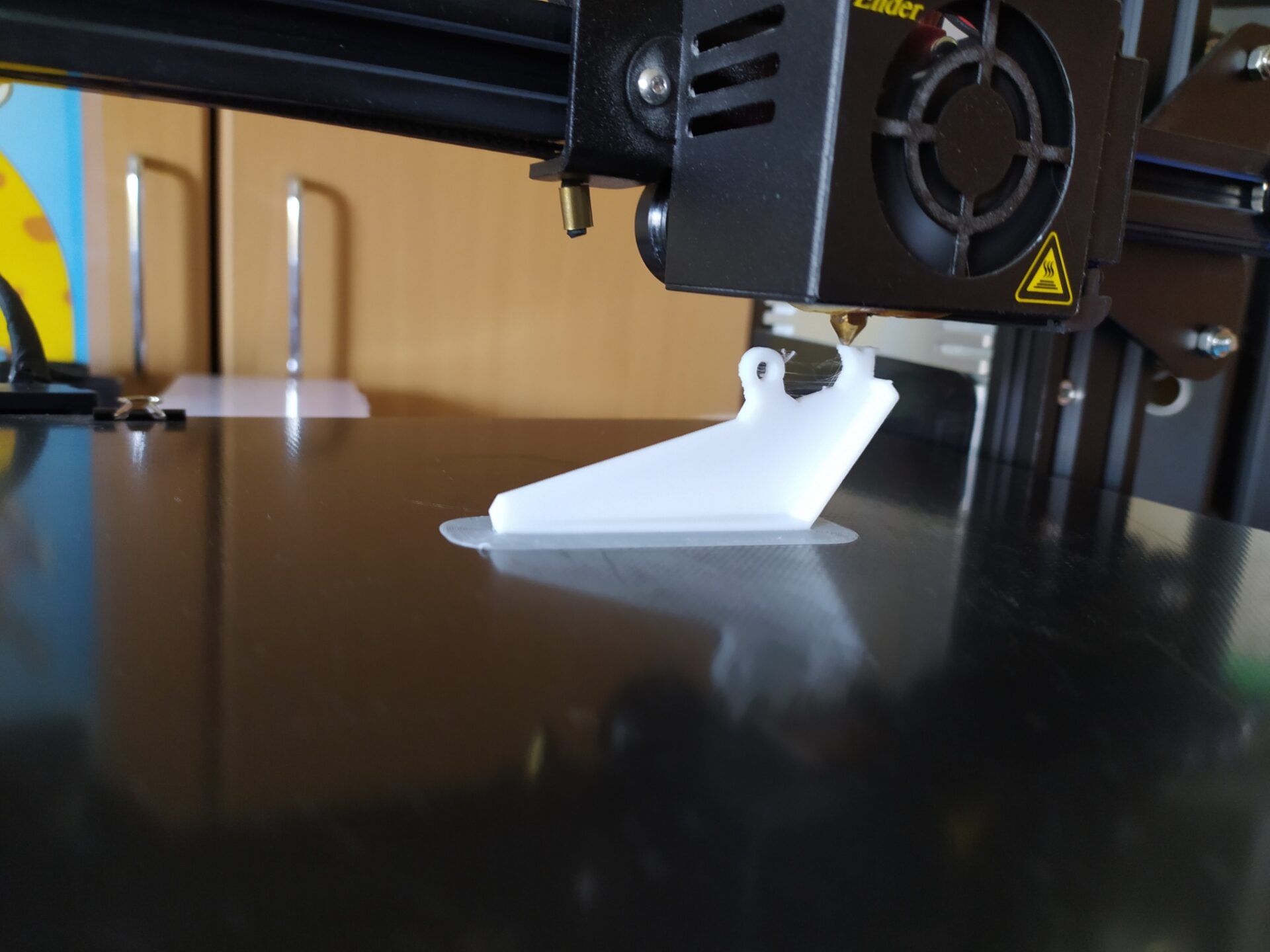
3D-Druck:
Das Modell kann gut über meinen Ender-3 gedruckt werden. Die ersten Drucke mache ich mit schwarzen PLA, dass im Ergebnis recht steife Modelle schafft. Leider bekomme ich damit (zumindest bei einem Teil) die Stützstrukturen nicht rausgebrochen (entweder das Teil oder das Werkzeug bricht).
Daher Wechsel auf eine weiße Variante mit der dann am Ende alles recht ordentlich läuft. Ich brauche aber sehr viele Teile (in Summe 50), daher dauert das Drucken doch ein paar Tage. Vom Ergebnis bin ich selber positiv überrascht, bisher ist das sowohl mein größtes Printprojekt als auch mein erstes an dem wirklich eine gewisse Genauigkeit erforderlich ist. Nach dem üblichen Anfangsproblemen (Leveling, Parametrisierung) kommt aber ein Teil nach dem anderen raus, und bis auf einem Filamentbruch im Extruderschlauch auch ohne Probleme.
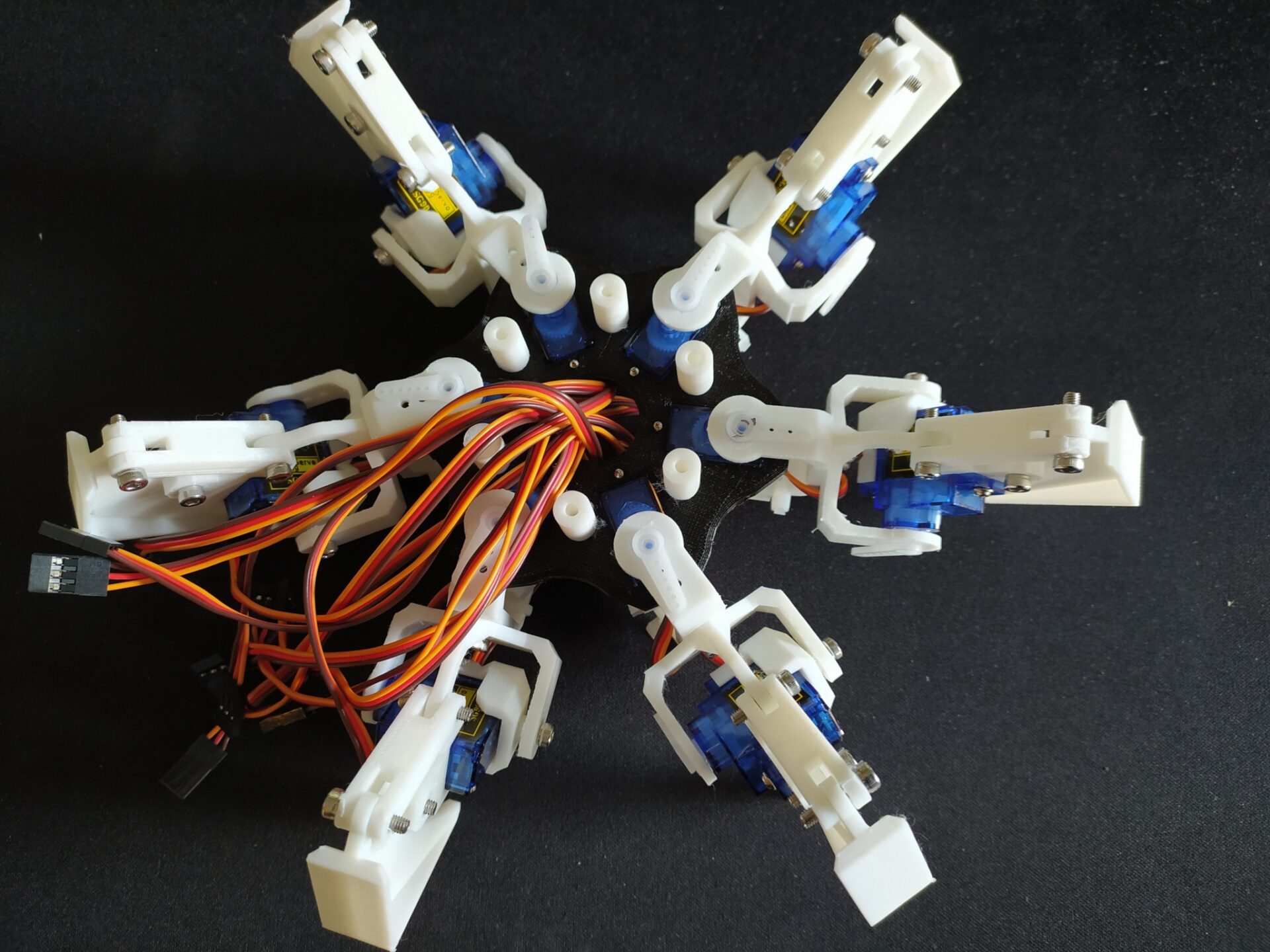
Aufbau:
Hier kommt die nächste Überraschung, es funktioniert einfach. Die Servos lassen sich gut montieren und die Teile passen ziemlich gut zueinander. Bis auf die eigentlichen Gelenke muss ich praktisch nix nacharbeiten. Die benötigten M3-Schrauben habe ich auf Lager und in den richtigen Längen. Tatsächlich sitzen die auch ohne Muttern gut genug, daher wird erst mal so aufgebaut. Am Ende gibt es nur an einer Stelle (die Servohalterung an der Basis) das Problem, das die dem Servo beigelegten Schrauben zu kurz sind um sicher zu greifen. Da muss ich noch Ersatz beschaffen und nacharbeiten. Auch die Verbindungen zwischen den zentralen Platten sind leider nicht festsitzend genug, auch da wird es nochmal nacharbeiten geben. Die Servoarme brauchen auch noch Schrauben zur Befestigung an die Modellteile, muss ich leider auch bestellen. Bei Kleinstschrauben fehlt mir einfach der Bestand.
Bis auf die meisten Servos und ein Paar Schrauben musste aber sonst nichts nachgekauft werden.
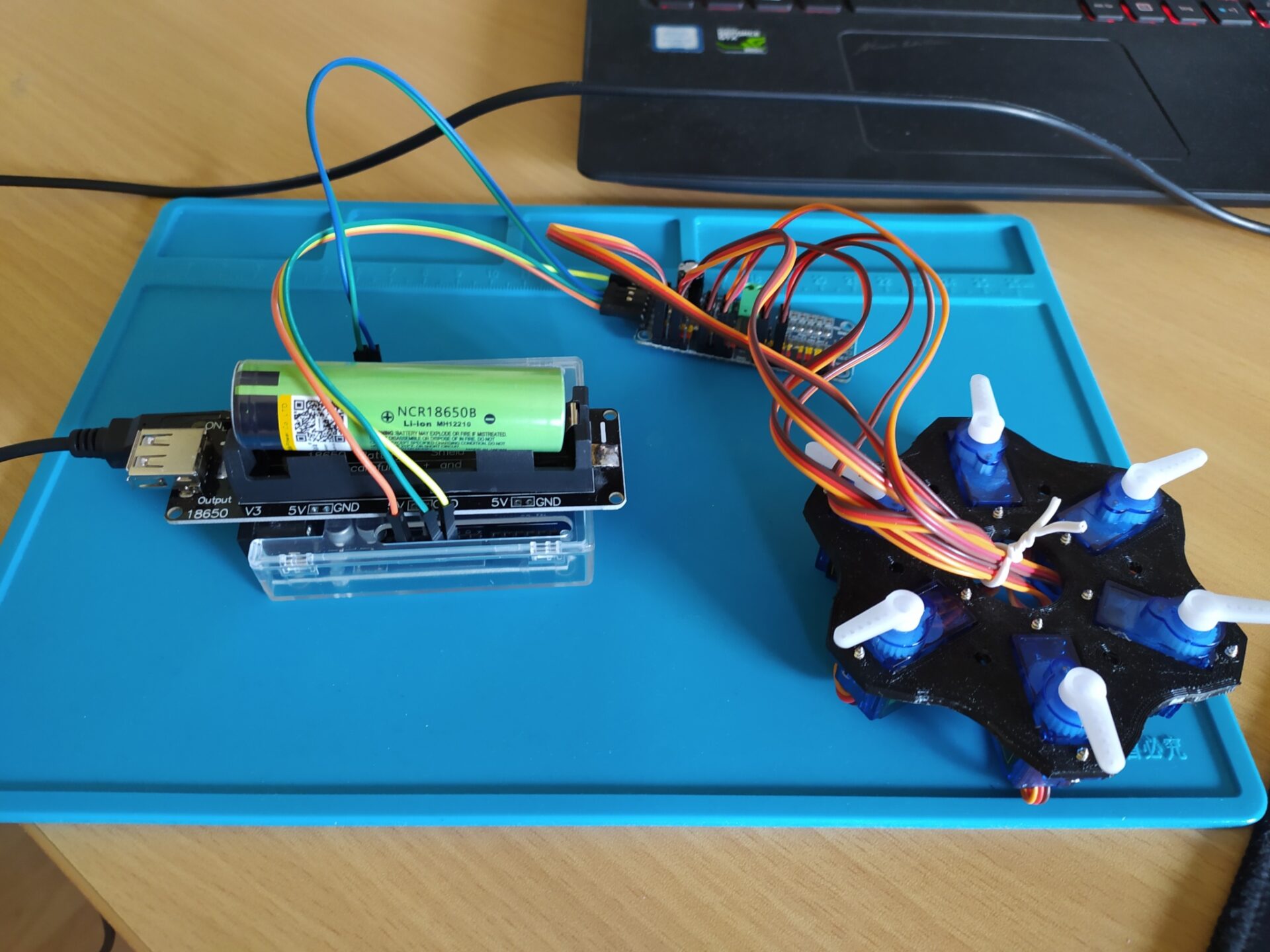
Elektronik:
Der Aufbau ist recht einfach. Der Arduino und die Stromversorgung sind fertige Teile und die Anbindung an den Servocontroller über I2C-Bus auch inzwischen kein Thema mehr. Lediglich die Servoleitungen (12) erfordern Konzentration und Frickelarbeit. Erst mal ist auch nur ein provisorischer Aufbau notwendig, da es ja immer noch offene Punkte beim Modell gibt und ich nicht wieder alles zerlegen will. Und der Umbau auf den ESP ist ja auch noch einzuplanen.
Software:
Auch hier profitiere ich vom Bestand. Meine Softwareumgebung mit meinen Libs hat aber schon lange keinen Arduino Uno mehr gesehen (ich nehme zumeist den ESP32) und zickt blöderweise rum. Also erst mal hier die Bugs raus und weiter im Text. An sich hatte ich früher schon mal die wichtigsten Klassen für ein Hexapod vorbereitet, damit stehen Architektur und einige theoretische Überlegungen und Designentscheidungen. Die Ansteuerung des PCA9685 ist mit den Arduino-Libs trivial und funktioniert auch sofort. In Summe bekomme ich das System schon nach wenigen Stunden dazu das es funktionieren sollte. Testlauf mit nur einem Bein sieht auch gut aus, der Rest wartet erst mal auf das fertige Modell.
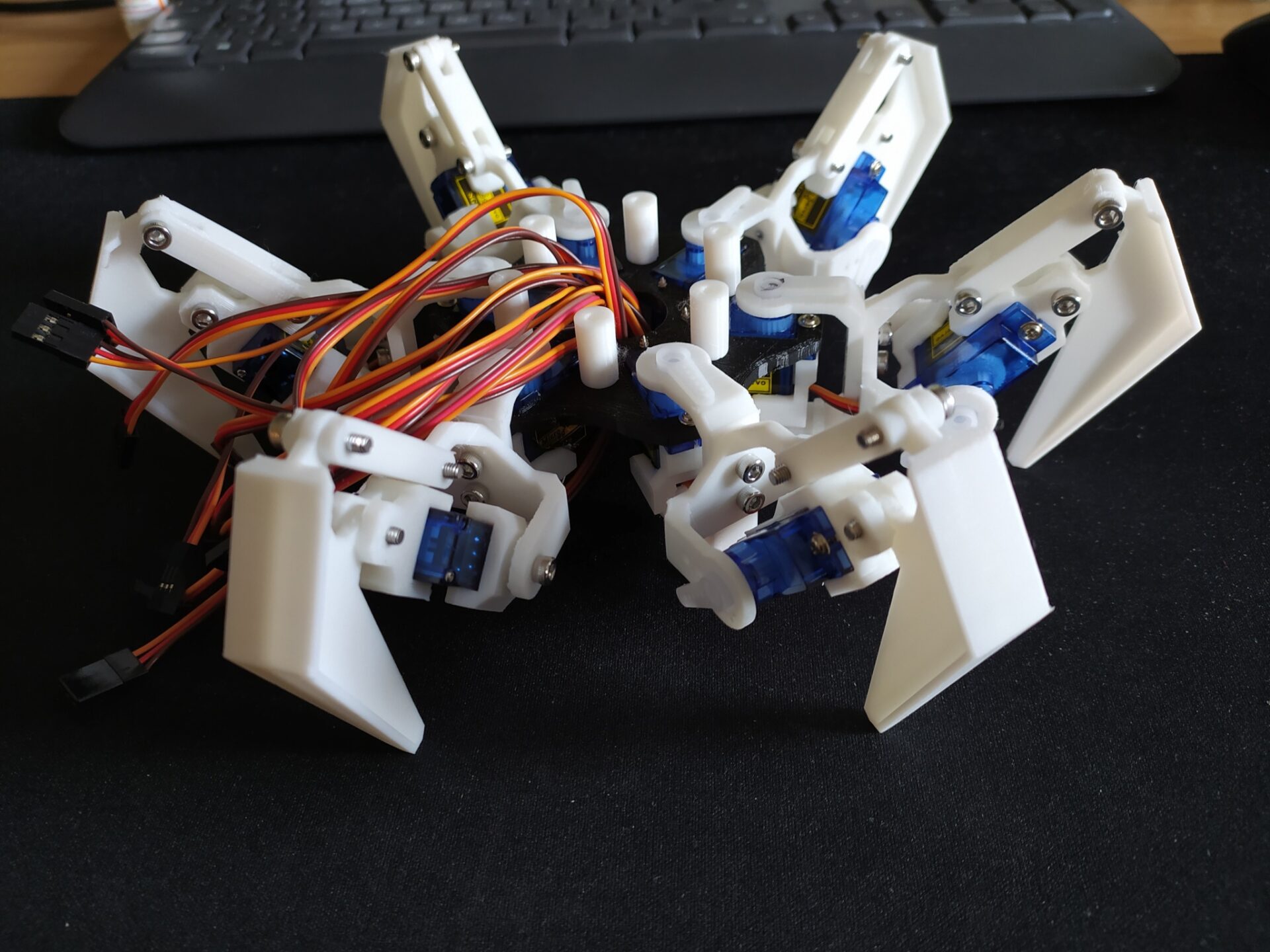
Fazit:
Bisher läuft es gut mit der Hausspinne. Bis auf die Zwangspause wegen der Schrauben hat es keinen Showstopper gegeben und die wenigen Probleme konnten mit Geduld, Bier und Zeit gut gelöst werden. Auch die Steuerung scheint gut auszusehen und so freue ich mich darauf das Ganze richtig zusammen zu sehen. Sobald die Schrauben da sind….
Hexapod – Wir werden besser
Hexapod – wir lernen laufen
Hexapod – Roboter mit Schüttellähmung
DIY – Hexapod als neue Hausspinne